
Extraction of tree crown parameters from high-density pure Chinese fir plantations based on UAV images
-
摘要:目的 冠幅是树冠结构的重要特征因子,直接影响树木的生产力和生命力,郁闭度是反映森林冠层结构与密度以及评价森林经营管理采伐强度的重要指标之一。利用无人机可以云下飞行,易于获取图像,精度高,低成本等优势,研究无人机影像上提取树冠参数的方法,使无人机影像提取林木树冠参数的操作系统化,实现精准高效的森林资源清查和监测。方法 以福建将乐林场杉木人工纯林为研究对象,采用四旋翼无人机影像为数据源,基于面向对象分类的方法,将杉木纯林的树冠参数从无人机影像中提取出来。面向对象分类的方法需要先利用ESP工具选取最优分割尺度,然后根据影像的分割结果将树冠对象聚为一类,进而统计每个树冠对象栅格像素个数计算出树冠冠幅面积以及林分郁闭度。结果 面向对象分类有效地对高郁闭度林分进行了树冠的提取。在分割尺度为70时,单木树冠分割效果最好,树冠被单独分割出来,但也存在一定的过分割以及未分割的问题,以至于部分单木的丢失。分割结束后,对分割对象进行特征空间的优化,选取适当的分类特征,最终将研究区分为树冠和林隙两类。通过统计每个对象栅格点数,计算得出的林分因子包括林分郁闭度,树冠面积。以地面实测数据作为参考,冠幅面积提取精度为0.829 1,林分郁闭度测量精度为0.973 1。结论 研究结果表明,基于无人机高分辨率影像的树冠参数提取在高郁闭度林分同样适用,能有效提高森林资源调查的效率并且能够满足森林资源调查的精度。Abstract:Objective Crown width is an important characteristic factor of canopy structure, which directly affects the productivity and vitality of trees. The forest canopy density is one of the important indexes to reflect forest canopy structure and density and to evaluate forest management and logging intensity. UAV has the advantages of easily getting high-resolution remote sensing images with high precision and low cost. Studying the method of extracting canopy parameters using UAV images is of great significance for improving the accuracy and efficiency of forest resource inventory and monitoring.Method Taking Chinese fir plantation in Jiangle Forest Farm of Fujian Province, eastern China as the research object, using the quadrotor UAV CCD image data as the data source, based on the object-oriented classification method, the canopy parameters of the Chinese fir plantation were extracted from the UAV images. Then the canopy objects were grouped into one group according to the segmentation results of the images, and the number of raster pixels of each canopy object was counted to calculate the canopy width area and canopy density.Result The object-oriented classification effectively extracted the crown of high canopy density stand. When the segmentation scale was 70, the segmentation of single tree had the best effect. Some single trees were lost during the segmentation process because of over-segmentation and under-segmentation. After completing the segmentation, optimizing the feature space of the segmented object and selecting appropriate classification features, finally the study area was divided into two types: canopy and forest gap. By counting the number of grid points of each object, the calculated stand factors included canopy density and crown area. With the measured data on the ground as reference, the crown area extraction accuracy was 0.829 1, and the forest canopy density measurement accuracy was 0.973 1.Conclusion The results show that the canopy parameter extraction based on high-resolution image of UAV is also applicable in high-canopy closed forest stands, which can effectively improve the efficiency and accuracy of forest resource survey.
-
树冠作为树木的重要组成部分,是树木呼吸和光合作用最主要的场所。冠幅是树冠结构的重要特征因子,直接影响树木的生产力和生命力,树冠能很好地预测树木的生物量和蓄积量[1]。在森林经营管理中,树冠信息的获取,已经越来越被重视。目前我国森林资源清查主要依靠人工实地调查以及遥感影像数据。人工调查需要大量的时间以及人工成本,并且误差很大。大多数遥感影像存在空间分辨率较低、获取成本高、不能随时获取数据等问题。无人机和数字摄影测量技术具有可以云下飞行、易于获取影像、精度高、成本低等优势,近些年在林业领域的应用发展迅速[2]。
无人机仅是平台,搭载不同的传感器,可以构成不同测量系统。搭载光学相机,则为无人机航空摄影系统;搭载小型激光雷达,则为无人机激光雷达测量系统[3]。早在20世纪70年代,西方国家就开始将遥感技术以及数字图像处理技术运用于林业领域[4],Brandtberg等[5]研究了航片上分割尺度大小对林冠提取的影响,发现若尺度过小,则可能把一颗完整的树冠分离破碎,难以把它们分成一棵棵独立的树冠;若尺度太大,则同一个像元内会出现多个重叠的树冠。Fritz等[6]利用无人机影像自动重建了单木信息。Grznárová等[7]评估了固定翼无人机对树冠直径提取精度的准确性。李丹等[8]比较了FCM聚类算法以及阈值分割法对于樟子松树冠分割的精度,但研究区林分均为成熟林,并且郁闭度不高,对高郁闭度林分的林分因子提取没有提出更好的方法。王枚梅等[9]验证了基于面向对象分类的无人机高分影像对于四川川西低郁闭度亚高山针叶林的树冠信息提取的可行性以及可靠性。毛学刚等[10]利用Quickbird遥感影像与Radarsat-2 数据一起进行了面向对象分类,研究了分割尺度对于树种分割以及分类的影响,评价了两种数据协同树种识别的适宜性。冯静静等[11]利用目视解译与灰度直方图结合的方法确定最优数学形态学算子,结合面向对象多尺度分割方法快速提取大范围单木树冠信息。史洁清等[12]指出,在植被茂密的地区,无人机遥感提取林木参数存在一定困难,只能通过人工判读提取郁闭度,对于高郁闭度的林分,没有充分发挥无人机的优势。
郁闭度是反映森林冠层结构与密度,描述森林生态系统环境指标、衡量森林质量优劣以及评价森林经营管理采伐强度的重要指标之一[13]。李崇贵[14]研究指出,在可能影响蓄积量估测的遥感和GIS因子中(能通过遥感和GIS技术有效获取的因子),郁闭度对蓄积量估测起决定性作用。
郁闭度可通过地面调查获取以及遥感估测。地面实测法往往耗时耗力,且只能获得小范围内具有代表性的数据,无法获得郁闭度空间连续分布及变化。为有效预测蓄积量,需先得到更为精准的林分郁闭度。
对于高郁闭度的林分,目前林木参数提取方法效果普遍不好[15-16],所以本研究探索了高分辨率无人机影像对于高郁闭度林分树冠参数的提取方法。本研究以福建将乐林场梅花谷杉木纯林为对象,提取了冠幅因子,并计算冠幅面积和郁闭度,证明基于无人机的遥感影像数据能够对林分进行树冠面积、冠幅、郁闭度提取,精度能达到目前森林资源调查的要求,无人机技术可应用于森林资源调查,并为实现森林资源调查的全面自动化打下基础。
1. 研究区概况及数据来源
1.1 研究区概况
研究区位于福建省三明市将乐县将乐国有林场,地理坐标为26°40′ ~ 26°50′ N,117° 25′ ~ 117°35′ E。最高海拔1 203 m,最低海拔140 m,平均海拔400 ~ 800 m。针叶树种主要有杉木(Cunninghamia lanceolata)、马尾松(Pinus massoniana),阔叶树种主要有枫香(Liquidambar formosana)、福建柏(Fokienia hodginsii)、巨尾桉(Eucalyptus grandis × E. urophylla)、木荷(Schima superba)等,本研究采用将乐林场梅花谷的杉木纯林作为研究对象。
1.2 无人机航片获取
航拍数据来自于2019年7月30日在福建将乐国有林场梅花谷进行的飞行试验。航摄于上午进行,光线充足,基本无风,几乎无阴影影响,适合无人机航拍作业。飞行使用大疆悟2四旋翼无人机,搭载Zenmuse X5S相机,无人机飞行高度为268 m,获取的无人机影像分辨率为5 cm,使用DJI GS pro规划具有规范重叠度的航向影片,规划飞机航线主航线重叠率为90%,主航线间重叠率为80%,云台俯仰角度为90°,以保证后期正射影像处理精度。无人机飞行区域大小为200 m × 200 m。由于本次裁剪的研究区较小,因此在无人机飞行区内设置了一块临时样地,利用测距仪分别测量了样地内杉木的东、西、南、北、东南、西南、西北、东北8个方向冠幅,在样地林隙较大的区域,铺设红布作为控制点,以便于样地实测树冠与自动提取信息进行匹配。
2. 研究方法
2.1 影像预处理
本文使用PIX4D mapper软件进行影像处理。软件仅根据影像内容,从任意角度,包括地理位置标签和控制点做精确对地定位[17]。将无人机拍摄的有规范重叠度的单张影像合成为数字正射影像。
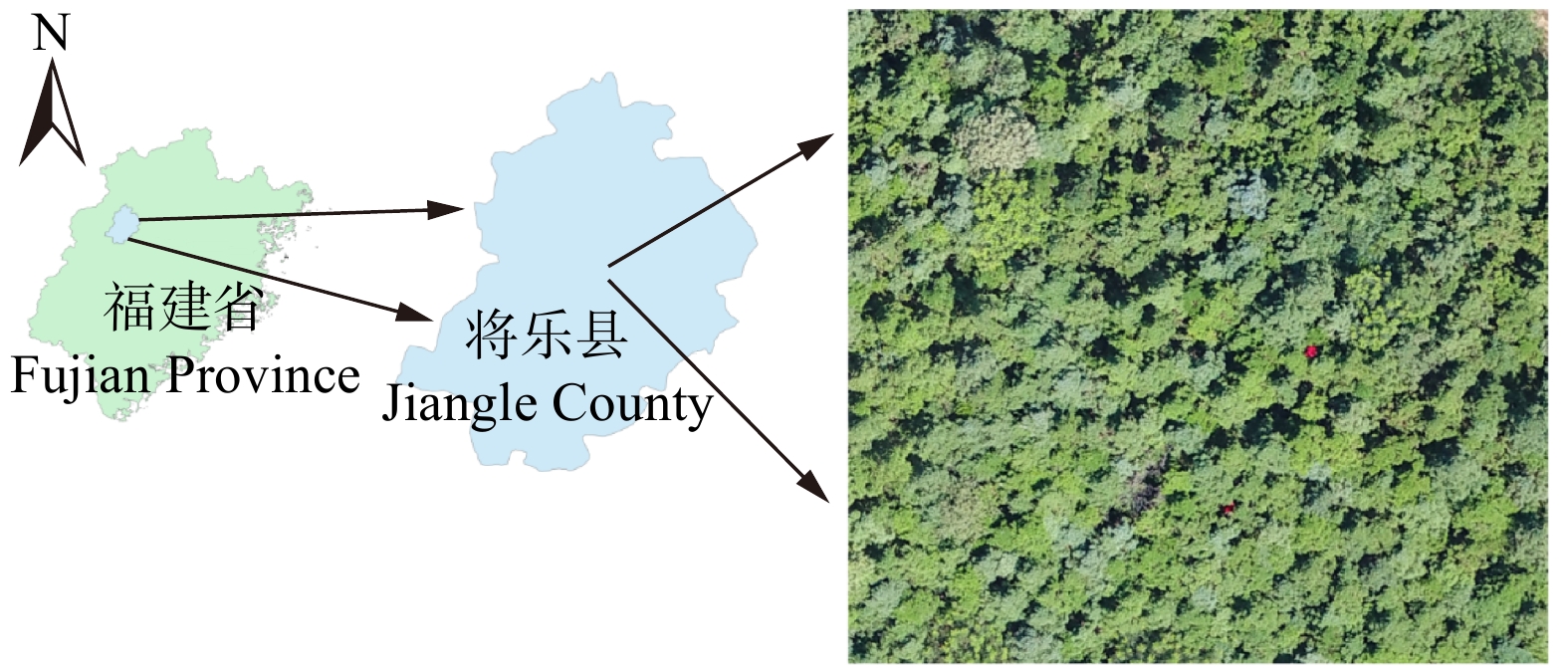
主要处理流程为:导入照片,导入控制点文件,全自动处理(包含高精度处理,空三加密,数字表面模型以及正射影像生成),输出精度报告。利用原始航空影像生成数字正射影像图(DOM)和数字表面模型(DSM)数据[18]。处理完成后,裁剪影像获取研究区的高分辨率正射影像(图1)。
![]() 图 1 研究区地理位置及正射影像Figure 1. Geographical location and orthographic image of the study area
图 1 研究区地理位置及正射影像Figure 1. Geographical location and orthographic image of the study area2.2 多尺度分割
使用eCognition Developer软件对预处理后的无人机影像进行多尺度分割。多尺度分割的思想是自下而上,逐级合并的,它是以图像中任一像元作为中心点,将这个像元周围异质性最小的像元集合合并成一个对象单元,然后再把这些小单元逐渐聚合成一个较大对象的过程。在这个过程中,尺度参数、形状参数、紧凑度参数是需要多次试验进行确定的参数。
eCognition Developer软件中的尺度参数即基于异质性最小的区域合并算法中的阈值,它直接决定了影像对象大小、分割的质量及信息提取的精度[19]。在执行多尺度分割算法的时候,需要尺度、紧凑度、形状 3个参数[20-21]。尺度参数越大,分割的对象越大,斑块数量越少;尺度参数越小,分割的对象越小,斑块数量越多。评价分割尺度的标准是:分割的对象内部均质性最大,对象之间异质性最大。在此基础上,分割尺度越大,运算量越小。
2.3 面向对象分类
经过分割的图像其中的对象是破碎的,需要的树冠信息还没有聚为一类[22]。eCognition Developer软件中有3种面向对象的地物分类方法:(1)面向对象影像分类;(2)面向对象影像分类(规则模式);(3)面向对象影像分类(样本模式)[23]。本文选择样本模式的分类方法,由于获取影像的位置位于福建将乐国有林场梅花谷,没有人工建筑以及河流湖泊的影响,因此将影像分为树冠以及林隙两类,然后在特征空间选取图像特征指标(光谱特征、纹理特征、形状特征)用于分类。
此处初选了光谱特征,包括在R、G、B 3个波段上像素平均值、亮度、VI值、Max.diff。
平均值:¯CL=1nn∑i=1CLi 式中:
¯CL 为第L图层上构成一个影像对象的像素值平均值,L=1,2,…,m;n为像素个数;CLi 为第 L 图层上第i个像素的值,也称为图层值。亮度:¯B=1mm∑L=1¯CL 式中:
¯B 为亮度;m为影像对象的图层数量;¯CL 为包含光谱信息的第L层图层值的平均值。VI是一种模拟NDVI的植被指数提取算法:
VI=(2G′−R′−B′)−(1.4R′−G′) 其中
R′=RR+G+B,G′=GR+G+B,B′=BR+G+B 式中:R为R波段上的平均值;G为G波段的平均值;B为B波段的平均值。
Max.diff=max 式中:
i ,j 为图层数;\overline {B} (v) 为图像对象v的亮度;{ \overline{B} _i}(v) 为图像对象v 的图像层i 的平均强度;{ \overline{B} _j}(v) 为图像对象v 的图像层j 的平均强度;{K_{\rm{b}}} 是有正亮度权重的图像层[24] 。(1)形状特征选择
形状特征包括长宽比和形状指数。长宽比等于协方差矩阵的特征值的比值,较大的特征值是分数的分子。
Y = \frac{l}{w} = \frac{{{\rm{ei{g}_1}}({s})}}{{{\rm{ei{g}_2}}({s})}},{\rm{ei{g}_1}}({s}) > {\rm{ei{g}_2}}({s}) 式中:Y为长宽比,
w 为宽度,l 为长度,{s} 是协方差矩阵,{\rm{ei{g}_1}}({s}) 、{\rm{ei{g}_2}}({s}) 为协方差特征值。{\text{形状指数:}}S = \frac{e}{{4\sqrt A }} 式中:
S 为形状指数;e 为影像对象的边界长度;A为影像对象的面积。(2)纹理特征选择
纹理特征包括常用的灰度共生矩阵的相异性和相关性。相异性描述了灰度共生矩阵中行或列元素间灰度值的相异程度,是灰度线性关系的度量。
{G_{{\rm{dis}}}}{\rm{ = }}\sum\limits_{i,j = 0}^{N - 1} {{P_{i,j}}\left| {i - j} \right|} 式中:
{G_{{\rm{dis}}}} 为相异性;i 、j 分别为行数,列数;{P_{i,j}} 为第i ,j 元素的标准化值,N 为行数或列数。相关性度量空间灰度共生矩阵元素在行或列方向上的相似程度,因此,相关值大小反映了图像中局部灰度相关性。当矩阵元素值均匀相等时,相关值就大;相反,如果矩阵像元值相差很大则相关值小。
{G_{{\rm{cor}}}}{\rm{ = }}\left[ {\sum\limits_i {\sum\limits_j {(i - {u_x})(j - {u_y})} } } \right]/({\sigma _x}{\sigma _y}) 式中:
{G_{{\rm{cor}}}} 为相关性;i 、j 分别为行数、列数;{u_x} 、{u_y} 分别为行的列的均值;{\sigma _x} 、{\sigma _y} 分别为行和列的标准偏差。2.4 林分郁闭度提取
使用基于面向对象分类分离出的地面和树冠对象,计算整个区域内的林分郁闭度。林分郁闭度(PC)为林分中树冠投影面积与林地面积之比。
{{P}_{\rm{C}}}=\frac{{{S}_{\rm{C}}}}{{{S}_{\rm{T}}}}=\frac{{{N}_{\rm{C}}}}{{{N}_{\rm{T}}}} 式中:SC
为林冠投影面积,ST为林地面积,NC为树冠对象像素总个数,NT为林地对象像素总个数。 2.5 精度分析
精度验证分为郁闭度精度验证以及冠幅面积精度验证,对林业郁闭度进行人工地面估测,郁闭度测量精度
{{R}_{{{P}_{\rm{C}}}}} 为:{{R}_{{{P}_{\rm{C}}}}}=1-\frac{\left| P-{{P}_{\rm{C}}} \right|}{P}, 式中:PC为面向对象分类提取的郁闭度值;P为人工地面估测的郁闭度值,
P={{\displaystyle\sum \limits _{i=1}^k}P_i}/{k} ,Pi 为第 i 个样地的郁闭度估测值,k为样地个数。若某个野外实测树木在分割结果中不存在记为丢失,或者在该区域出现了多个分割树冠记为过分割,都判定为错误分割,正确分割的树木记为完整,提取树木所占百分比即为株数精度,完整树木所占百分占比即为单木分割用户精度。
3. 结果与分析
3.1 多尺度分割提取树冠
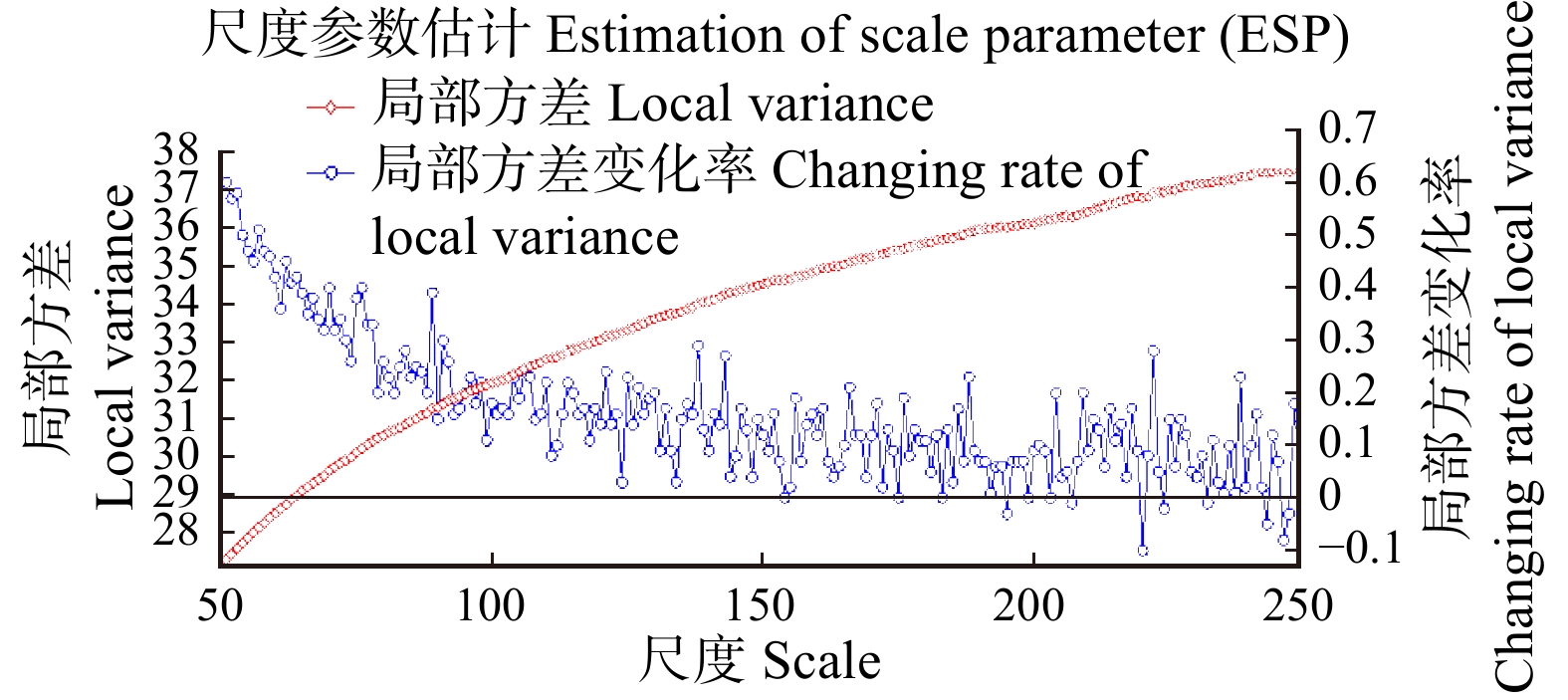
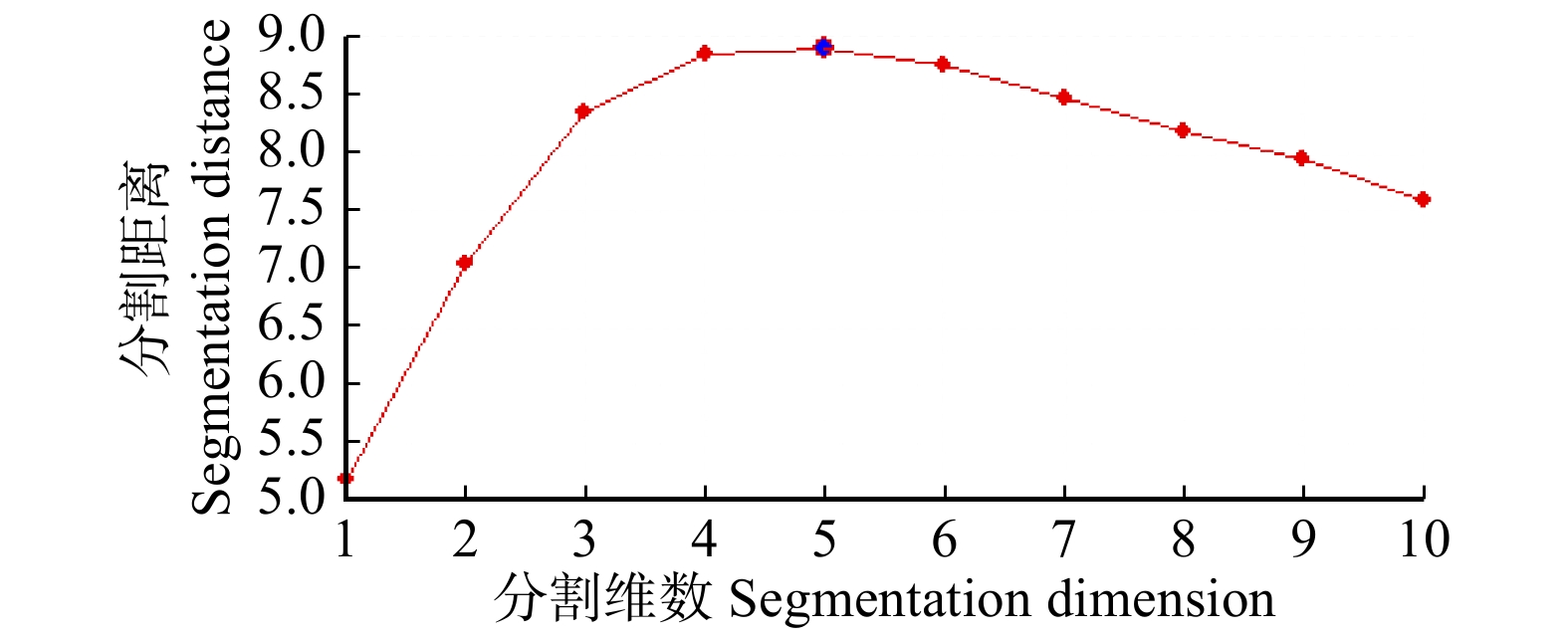
计算最优尺度主要是通过eCognition Developer软件中的ESP2插件,将逐步分割处理每次的增加量(step size)设置为1,以便更精确的找出最优分割尺度;由于图像信息的不同,开始出现的最优尺度也不同,所以要设置分割的起始尺度,本文将起始尺度设置为50;循环次数(number of loops)为执行分割的次数,此处设置为200,分割次数达到250是停止循环;形状参数和紧凑度参数参考前人研究均设置为0.5。循环结束后,输出一个文本文档,在ESP_Estimation_Scale_Parameter_Chart.exe中输入文本文档,生成如图2的折线图。横坐标为尺度参数,纵坐标分别为局部方差(LV)以及局部方差变化率(ROC)。ROC的波峰则表示此时的尺度参数为某种地物对象的最佳分割尺度[25]。
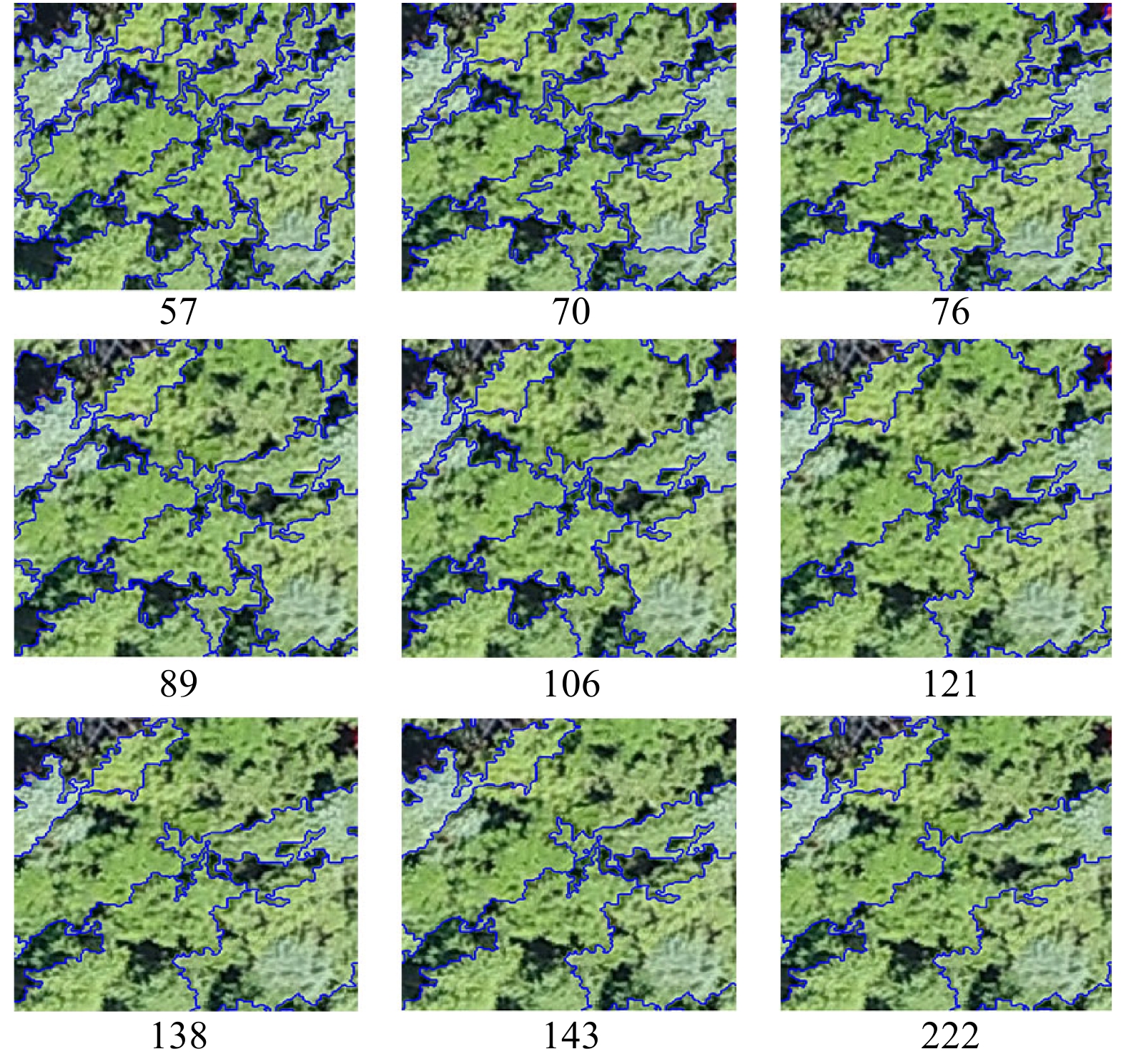
通过以上处理,可以得到该图像的最优尺度有57、70、76、89、106、121、138、143、166、188、204、209、222。由图3可以看出,当分割尺度为57的时候,树冠被分割的较为破碎,出现了过分割现象,当分割尺度为70的时候,树冠分割的较为清晰,当分割尺度为76的时候,出现了一定程度的树冠的合并,当分割尺度为86直到222的时候,树冠合并的规模越来越大,不能明确的分割出树冠,因此,在形状参数和紧凑度参数都设置为0.5的情况下,本次分割的最优尺度为70。
![]() 图 3 不同尺度分割下的树冠对比图57、70、76、89、106、121、138、143、222为多尺度分割所得最优尺度。57, 70, 76, 89, 106, 121, 138, 143, 222 are the optimal scales obtained by multi-scale segmentation.Figure 3. Comparison in crown under different segmentation scales
图 3 不同尺度分割下的树冠对比图57、70、76、89、106、121、138、143、222为多尺度分割所得最优尺度。57, 70, 76, 89, 106, 121, 138, 143, 222 are the optimal scales obtained by multi-scale segmentation.Figure 3. Comparison in crown under different segmentation scales3.2 面向对象分类
利用样本采集器,按照树冠和林隙两类进行采样,当系统计算的分类依据高于0.85时表示采样具有代表性。一般情况下,选取的图像特征越多,分类精度越高,但是,没法定量每个特征的具体贡献,可能存在冗余,增大运算量,空间特征优化能帮助我们找出最佳特征组合,所以将前述10个分类特征全部选入特征空间优化工具,进行优化,如图4所示。
![]() 图 4 分割维数与分割距离关系图Figure 4. Relation graph between segmentation dimension and segmentation distance
图 4 分割维数与分割距离关系图Figure 4. Relation graph between segmentation dimension and segmentation distance可以看到,当分类特征为5维时,最低分离度最高,此时为分割特征的最佳组合(包括G均值、R均值、亮度、B均值、Max.diff)。
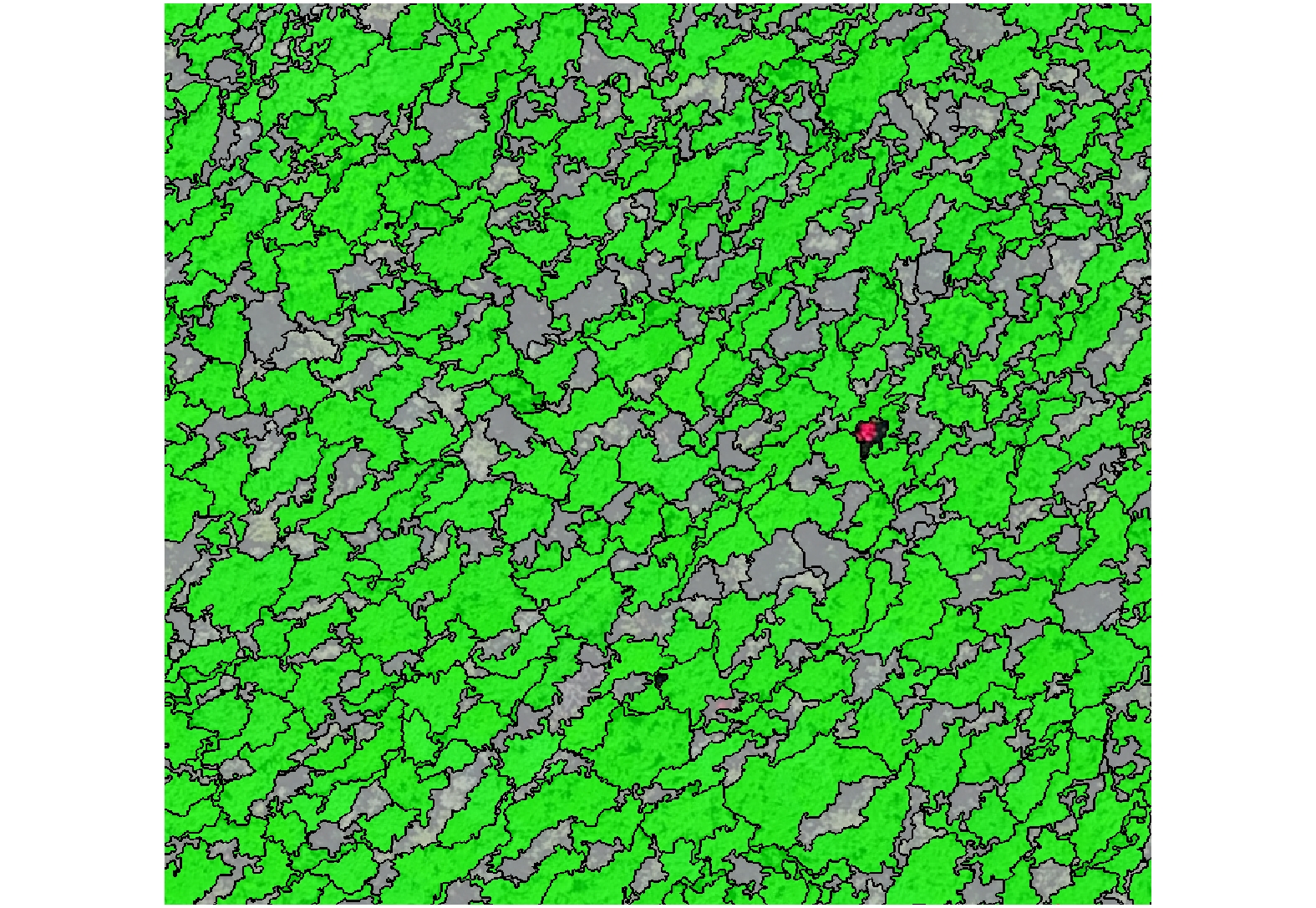
重新选取上述特征空间,提取出树冠(图5)。在eCognition Developer软件中导出树冠分类结果文件以 shp 格式输出,叠加分类图到原始影像上。
![]() 图 5 树冠提取结果绿色为树冠,灰色为林隙。Green is crown, grey is forest gap.Figure 5. Crown extraction results
图 5 树冠提取结果绿色为树冠,灰色为林隙。Green is crown, grey is forest gap.Figure 5. Crown extraction results3.3 林分郁闭度提取精度对比
将影像提取冠幅数据导入 Arcgis10.5 软件中,与影像进行配准,利用渔网功能生成渔网,再将导出的矢量分割线与渔网连接算出每个对象内的栅格个数,再结合2.4的林分郁闭度公式计算出整个区域林分郁闭度为0.778 5,相较于人工地面测量,测量精度为0.973 1。
3.4 树冠参数提取精度对比
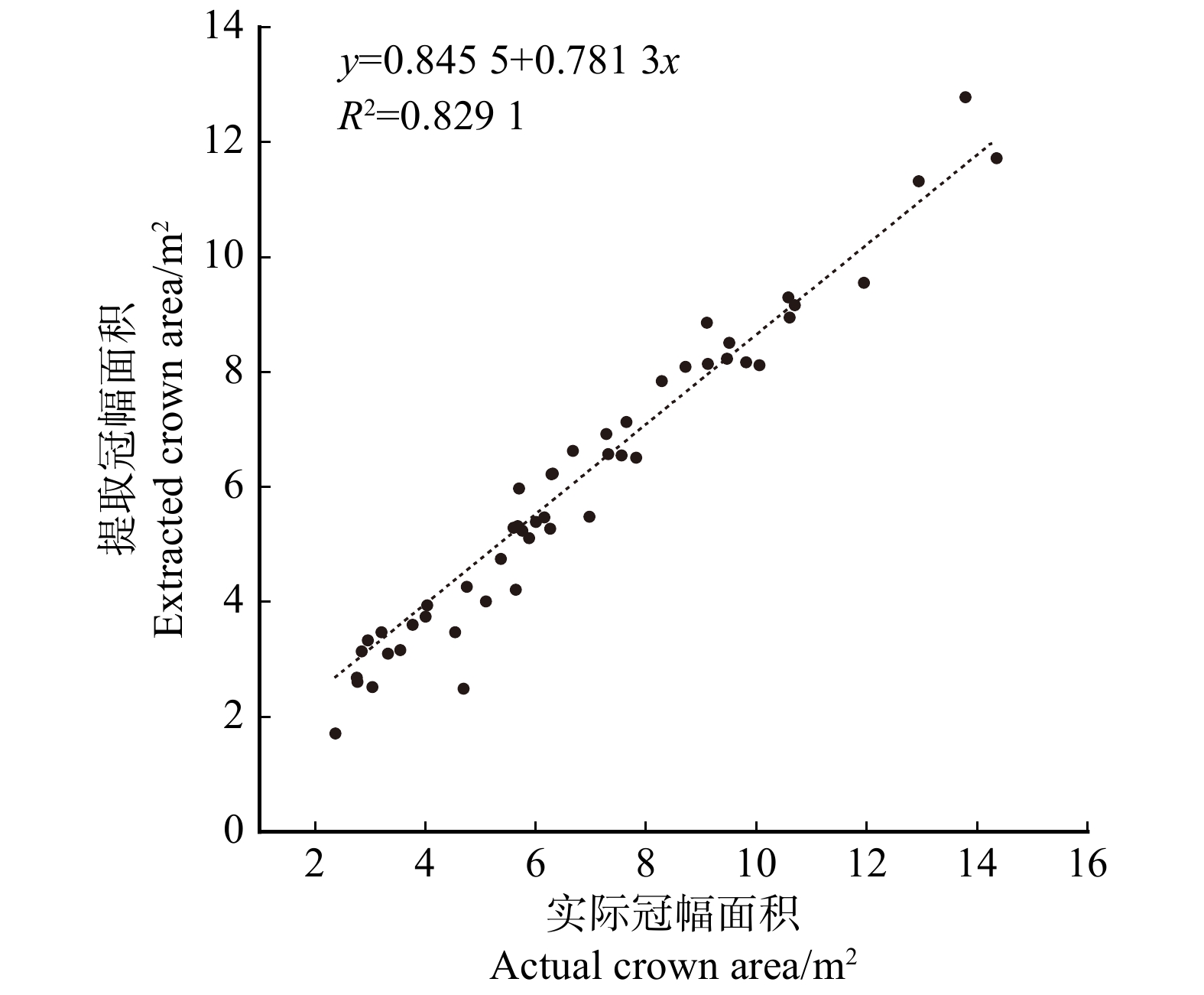
由于本次裁剪的研究区较小,因此在研究区内设置了一块临时样地,以此作为样本。为了对自动提取的树冠精度进行验证,在分割后的图像上找到做好标记的临时样地。利用统计的栅格个数乘上每个像素大小算出每个对象的面积,以此作为提取冠幅面积。临时样地实测的8个方向的冠幅,利用Arcgis10.5点转面工具画出冠幅图并计算出树冠实际面积,以此作为冠幅真实面积(图6),将目视解译的同一株杉木的地面实测冠幅与影像提取冠幅一一对应。结果见图6、图7和表1。
表 1 精度分析Table 1. Precision analysis实际株数
Actual tree number提取株数
Extracted tree number株数精度
Plant number accuracy/%完整株数
Complete tree number丢失株数
Lost tree number用户精度
User accuracy/%55 53 96.4 51 4 92.7 ![]() 图 7 提取冠幅面积与实测冠幅面积散点图Figure 7. Scatter plots of extracted crown area and actual crown area
图 7 提取冠幅面积与实测冠幅面积散点图Figure 7. Scatter plots of extracted crown area and actual crown area如图7所示,提取冠幅面积与实测冠幅面积R2为0.829 1,这说明无人机影像对于高郁闭度林分,利用面向对象分类的方法分割树冠是可行的,结果是可信的,能够满足生产中对于树冠参数精度的需要。
从表1可以看出基于多尺度分割提取的株数少于实际株数,株数精度为96.4%,用户精度为92.7%,存在过分割和欠分割的现象,可能是由于林分郁闭度较高,最优分割尺度作为单一的分割尺度不能代表所有对象特征的最优分割尺度。并且高郁闭度林分,林冠之间间距较小,互相之间存在重叠交叉现象,导致了单木树冠的丢失以及错误合并,所以提取值小于实测值。
4. 结论与讨论
林业信息化是目前林业研究的重点,无人机作为一种新型的平台,在林业资源调查中得到越来越多的应用,有效的减轻了林业调查的工作量并且提高了林业调查的精度[26]。本文利用无人机获取的梅花谷杉木纯林研究区高分影像,采用面向对象分类的方法,对树冠参数进行了提取,然后通过计算每个对象栅格像素个数,计算了所提取的每个对象的面积大小。研究结果表明:相较于以往通过提取林木南北冠幅、东西冠幅以此计算树冠投影面积,本文直接对影像分割对象进行面积计算,精度更高。提取冠幅面积与实测冠幅面积的R2达到了0.829 1,林分郁闭度为0.778 5,这说明了面向对象的分类方法对于高郁闭度林分也能很好的提取树冠信息参数。尺度参数虽然是一个无量纲的概念,但却是影响分割质量的重要因素,进而影响面向对象分类的分类结果。对于尺度参数的选取,本文并未重新设置形状参数与紧凑度参数,因此本文的分类精度仍有一定的提升空间。
利用无人机对树冠参数进行提取时,对于研究区的选择有很大的限制,目前树冠分割的研究对象多为平坦地形上的稀疏林分,当地形存在一定的坡度时,树冠参数提取精度大幅下降。本文选择的研究区为杉木纯林,不同树种纹理特征以及颜色特征的不同,对于面向对象分类的特征空间的选择的影响没有考虑。无人机搭载高分相机,由于光照的原因,或多或少的会受到光影的影响,如何消除或者减小阴影的影响有待进一步研究。本研究研究区内为杉木纯林,使得研究结果具有一定的局限性。在进一步的研究中,需要在不同树种的样地上验证本文的结果。
-
![]()
图 1 研究区地理位置及正射影像
Figure 1. Geographical location and orthographic image of the study area
![]()
图 3 不同尺度分割下的树冠对比图
57、70、76、89、106、121、138、143、222为多尺度分割所得最优尺度。57, 70, 76, 89, 106, 121, 138, 143, 222 are the optimal scales obtained by multi-scale segmentation.
Figure 3. Comparison in crown under different segmentation scales
![]()
图 4 分割维数与分割距离关系图
Figure 4. Relation graph between segmentation dimension and segmentation distance
![]()
图 5 树冠提取结果
绿色为树冠,灰色为林隙。Green is crown, grey is forest gap.
Figure 5. Crown extraction results
![]()
图 7 提取冠幅面积与实测冠幅面积散点图
Figure 7. Scatter plots of extracted crown area and actual crown area
表 1 精度分析
Table 1 Precision analysis
实际株数
Actual tree number提取株数
Extracted tree number株数精度
Plant number accuracy/%完整株数
Complete tree number丢失株数
Lost tree number用户精度
User accuracy/%55 53 96.4 51 4 92.7  下载: 导出CSV
下载: 导出CSV
-
[1] 李赟, 温小荣, 佘光辉, 等. 基于UAV高分影像的杨树冠幅提取及相关性研究[J]. 林业科学研究, 2017, 30(4):653−658. Li Y, Wen X R, She G H, et al. Study on poplar crown extraction and correlation based on UAV high resolution image[J]. Forest Research, 2017, 30(4): 653−658.
[2] 于旭宅, 王瑞瑞, 陈伟杰. 改进分水岭算法在无人机遥感影像树冠分割中的应用[J]. 福建农林大学学报(自然科学版), 2018, 47(4):428−434. Yu X Z, Wang R R, Chen W J. Forest canopy segmentation of UAV remote sensing images using improved watershed algorithm[J]. Journal of Fujian Agricultural and Forestry University (Natural Science Edition), 2018, 47(4): 428−434.
[3] 唐晏. 基于无人机采集图像的植被识别方法研究[D]. 成都: 成都理工大学, 2014. Tang Y. Research on the vegetation identification method based on UAV image acquisition[D]. Chengdu: Chengdu University of Technology, 2014.
[4] 付凯婷. 无人机遥感技术估算桉树蓄积量的研究[D]. 南宁: 广西大学, 2015. Fu K T. UAV remote sensing technology to estimate the research of eucalyptus volume[D]. Nanning: Guangxi University, 2015.
[5] Brandtberg T, Walter F. Automated delineation of individual tree crowns in high spatial resolution aerial images by multiple-scale analysis[J]. Machine Vision and Applications, 1998, 11(2): 64−73. doi: 10.1007/s001380050091
[6] Fritz A, Kattenborn T, Koch B. UAV-based photogrammetric point clouds-tree stem mapping in open stands in comparison to terrestrial laser scanner point clouds[C]//International archives of the photogrammetry, remote sensing and spatial information sciences. Rostock: ISPRS, 2013.
[7] Grznárová A, Mokroš M, Surový P, et al. The crown diameter estimation from fixed wing type of UAV imagery [C]// International archives of the photogrammetry, remote sensing and spatial information sciences. Enschede: ISPRS, 2019.
[8] 李丹, 张俊杰, 赵梦溪. 基于FCM和分水岭算法的无人机影像中林分因子提取[J]. 林业科学, 2019, 55(5):180−187. doi: 10.11707/j.1001-7488.20190520 Li D, Zhang J J, Zhao M X. Extraction of stand factors in UAV image based on FCM and watershed algorithm[J]. Scientia Silvae Sinicae, 2019, 55(5): 180−187. doi: 10.11707/j.1001-7488.20190520
[9] 王枚梅, 林家元, 林沂, 等. 基于无人机可见光影像的亚高山针叶林树冠参数信息自动提取[J]. 林业资源管理, 2017(4):82−88. Wang M M, Lin J Y, Lin Y, et al. Subalpine coniferous forest crown information automatic extraction based on optical UAV remote sensing imagery[J]. Forest Resources Management, 2017(4): 82−88.
[10] 毛学刚, 陈文曲, 魏晶昱, 等. 分割尺度对面向对象树种分类的影响及评价[J]. 林业科学, 2017, 53(12):73−83. doi: 10.11707/j.1001-7488.20171208 Mao X G, Chen W Q, Wei J Y, et al. Effect and evaluation of segmentation scale on object-based forest species classification[J]. Scientia Silvae Sinicae, 2017, 53(12): 73−83. doi: 10.11707/j.1001-7488.20171208
[11] 冯静静, 张晓丽, 刘会玲. 基于灰度梯度图像分割的单木树冠提取研究[J]. 北京林业大学学报, 2017, 39(3):16−23. Feng J J, Zhang X L, Liu H L. Single tree crown extraction based on gray gradient image segmentation[J]. Journal of Beijing Forestry University, 2017, 39(3): 16−23.
[12] 史洁青, 冯仲科, 刘金成. 基于无人机遥感影像的高精度森林资源调查系统设计与试验[J]. 农业工程学报, 2017, 33(11):82−90. doi: 10.11975/j.issn.1002-6819.2017.11.011 Shi J Q, Feng Z K, Liu J C. Design and experiment of high precision forest resource investigation system based on UAV remote sensing images[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(11): 82−90. doi: 10.11975/j.issn.1002-6819.2017.11.011
[13] 穆喜云, 张秋良, 刘清旺, 等. 基于机载LiDAR数据的林分平均高及郁闭度反演[J]. 东北林业大学学报, 2015, 43(9):84−89. doi: 10.3969/j.issn.1000-5382.2015.09.017 Mu X Y, Zhang Q L, Liu Q W, et al. Inversion of forest height and canopy closure using airborne LiDAR data[J]. Journal of Northeast Forestry University, 2015, 43(9): 84−89. doi: 10.3969/j.issn.1000-5382.2015.09.017
[14] 李崇贵, 蔡体久. 森林郁闭度对蓄积量估测的影响规律[J]. 东北林业大学学报, 2006, 34(1):15−17. doi: 10.3969/j.issn.1000-5382.2006.01.006 Li C G, Cai T J. Effect of forest canopy density on stock volume estimation[J]. Journal of Northeast Forestry University, 2006, 34(1): 15−17. doi: 10.3969/j.issn.1000-5382.2006.01.006
[15] 郭昱杉, 刘庆生, 刘高焕, 等. 基于标记控制分水岭分割方法的高分辨率遥感影像单木树冠提取[J]. 地球信息科学学报, 2016, 18(9):1259−1266. Guo Y S, Liu Q S, Liu G H, et al. Individual tree crown extraction of high resolution image based on marker-controlled watershed segmentation method[J]. Journal of Geo-Information Science, 2016, 18(9): 1259−1266.
[16] 付尧. 杉木人工林生态系统生物量及碳储量定量估测[D]. 北京: 北京林业大学, 2016. Fu Y. Quantitative estimation of biomass and carbon storage for Chinese fir plantation[D]. Beijing: Beijing Forestry University, 2016.
[17] 孙鸿博, 杨扬, 郭可贵, 等. 基于无人机多源遥感的输电线下树冠分割方法研究[J]. 中南林业调查规划, 2018, 37(2):30−33, 35. Sun H B, Yang Y, Guo K G, et al. Research on the method of subdivision canopy segmentation based on UAV multi-source remote sensing[J]. Central South Forest Inventory and Planning, 2018, 37(2): 30−33, 35.
[18] 何艺, 周小成, 黄洪宇, 等. 基于无人机遥感的亚热带森林林分株数提取[J]. 遥感技术与应用, 2018, 33(1):168−176. He Y, Zhou X C, Huang H Y, et al. Counting tree number in subtropical forest districts based on UAV remote sensing images[J]. Remote Sensing Technology and Application, 2018, 33(1): 168−176.
[19] 王伟. 无人机影像森林信息提取与模型研建[D]. 北京: 北京林业大学, 2015. Wang W. Forest information extraction and model building based on UAV image[D]. Beijing: Beijing Forestry University, 2015.
[20] 肖武, 任河, 吕雪娇, 等. 基于无人机遥感的高潜水位采煤沉陷湿地植被分类[J]. 农业机械学报, 2019, 50(2):177−186. doi: 10.6041/j.issn.1000-1298.2019.02.020 Xiao W, Ren H, Lü X J, et al. Vegetation classification by using UAV remote sensing in coal mining subsidence wetland with high ground-water level[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 177−186. doi: 10.6041/j.issn.1000-1298.2019.02.020
[21] 李赟. 基于UAV高分影像的林木冠幅提取与蓄积量估测研究[D]. 南京: 南京林业大学, 2017. Li Y. Study on crown extraction and forest volume estimation based on UAV high resolution image[D]. Nanjing: Nanjing Forestry University, 2017.
[22] 穆亚南, 丁丽霞, 李楠, 等. 基于面向对象和随机森林模型的杭州湾滨海湿地植被信息提取[J]. 浙江农林大学学报, 2018, 35(6):1088−1097. doi: 10.11833/j.issn.2095-0756.2018.06.012 Mu Y N, Ding L X, Li N, et al. Classification of coastal wetland vegetation in Hangzhou Bay with an object-oriented, random forest model[J]. Journal of Zhejiang A&F University, 2018, 35(6): 1088−1097. doi: 10.11833/j.issn.2095-0756.2018.06.012
[23] 陈济才, 文学虎, 李国明. 基于面向对象的高分影像地表覆盖典型要素快速提取对比研究[J]. 遥感信息, 2014, 29(4):37−40. doi: 10.3969/j.issn.1000-3177.2014.04.008 Chen J C, Wen X H, Li G M. Fast extraction of typical features of land-cover based on object-oriented technique with high-resolution remote sensing imagery[J]. Remote Sensing Information, 2014, 29(4): 37−40. doi: 10.3969/j.issn.1000-3177.2014.04.008
[24] Trimble Germany GmbH. eCognition developer 9.0 reference book[Z]. Munich: Trimble Germany GmbH, 2014.
[25] 吴见, 彭道黎. 基于面向对象的QuickBird影像退耕地树冠信息提取[J]. 光谱学与光谱分析, 2010, 30(9):2533−2536. doi: 10.3964/j.issn.1000-0593(2010)09-2533-04 Wu J, Peng D L. Tree-crown information extraction of farmland returned to forests using QuickBird image based on object-oriented approach[J]. Spectroscopy and Spectral Analysis, 2010, 30(9): 2533−2536. doi: 10.3964/j.issn.1000-0593(2010)09-2533-04
[26] 毛学刚, 邢秀丽, 李佳蕊, 等. 基于航空正射影像的面向对象林隙识别[J]. 林业科学, 2019, 55(2):87−96. doi: 10.11707/j.1001-7488.20190209 Mao X G, Xing X L, Li J R, et al. Object-oriented recognition of forest gap based on aerial orthophoto[J]. Scientia Silvae Sinicae, 2019, 55(2): 87−96. doi: 10.11707/j.1001-7488.20190209
-
期刊类型引用(17)
1. 张禹,赵雯昊,乔沈启,王亚童,李会平,刘炳响. 不同针阔叶树蒸腾耗水特性及单位面积耗水量估算. 东北林业大学学报. 2025(01): 112-119 .  百度学术
百度学术
2. 杨安蓉,张超. 基于无人机遥感的云南松林冠参数提取研究. 西北林学院学报. 2024(01): 1-9 . 百度学术
3. 谢运鸿,孙钊,丁志丹,罗蜜,李芸,孙玉军. 基于Mask R-CNN和迁移学习的无人机遥感影像杉木单木树冠提取. 北京林业大学学报. 2024(03): 153-166 . 本站查看
4. 黄新峰,孙红召,冯东阳,李放,冯瑞琦,李伟,李丹. 应用小型无人机对毁坏林地开展调查分析. 河南林业科技. 2024(02): 25-28 . 百度学术
5. 孙钊,谢运鸿,王宝莹,谭军,王轶夫,孙玉军. 基于无人机多维数据集的森林地上生物量估测模型研究. 农业机械学报. 2024(06): 186-195+236 . 百度学术
6. 张振飞,郭靖,颜安,袁以琳,肖淑婷,侯正清,孙哲. 基于多光谱无人机不同飞行高度下苹果树冠幅信息的提取. 新疆农业科学. 2024(06): 1468-1476 . 百度学术
7. 穆喜云,李显玉,吴红雪,李秀华,张今奇,董文信,许成国. 无人机在不同飞行高度下的精度差异分析. 内蒙古林业调查设计. 2023(02): 86-88+38 . 百度学术
8. 杨晓慧,吴金卓,刘浩然,钟浩,林文树. 基于UAV-LiDAR的人工林林分郁闭度估测. 林业科学. 2023(08): 12-21 . 百度学术
9. 王娟,张超,陈巧,李华玉,彭希,白明雄,徐志扬,刘浩栋,陈永富. 结合无人机可见光和激光雷达数据的杉木树冠信息提取. 西南林业大学学报(自然科学). 2022(01): 133-141 . 百度学术
10. 周辰琴,余拥军,方陆明,刘雨真,胡建锦. 飞行高度与郁闭度对水杉冠幅提取影响的研究. 林业资源管理. 2022(01): 150-156 . 百度学术
11. 杨安蓉,张超,王娟,李华玉,白明雄,张玉薇. 应用无人机可见光遥感技术估测林分蓄积量. 东北林业大学学报. 2022(05): 70-75 . 百度学术
12. 李苏春,林露花,夏磊,胡璐璐,徐小军. 基于改进的局部最大值法提取杉木单木位置. 林业资源管理. 2022(05): 60-68 . 百度学术
13. 邬宁珊,王佳希,张岩,元慕田,张琪,高驰宇. 基于无人机可见光影像的树种和树冠信息提取——以晋西黄土区蔡家川流域为例. 浙江农业学报. 2021(08): 1505-1518 . 百度学术
14. 韩蕊,慕涛阳,赵伟,李丹. 基于无人机多光谱影像的柑橘树冠分割方法研究. 林业工程学报. 2021(05): 147-153 . 百度学术
15. 王瑞瑞,李怡燃,石伟,段芸杉,陈兴旺. 基于LiDAR和DOM数据的薇甘菊自动识别与分布预测. 农业机械学报. 2021(11): 263-270 . 百度学术
16. 姚慧芳,卢杰,王超,张萌. 基于混合效应法的急尖长苞冷杉林单木冠幅预测模型. 高原农业. 2021(06): 572-580 . 百度学术
17. 王娟,陈永富,陈巧,李华玉,张超. 基于无人机遥感的森林参数信息提取研究进展. 林业资源管理. 2020(05): 144-151 . 百度学术
其他类型引用(14)















































计量
- 文章访问数: 6000
- HTML全文浏览量: 1327
- PDF下载量: 221
- 被引次数: 31
