
Effects of super absorbent polymer dosage on growth, photosynthetic characteristics and stress-resistance physiology of Populus euphratica seedlings
-
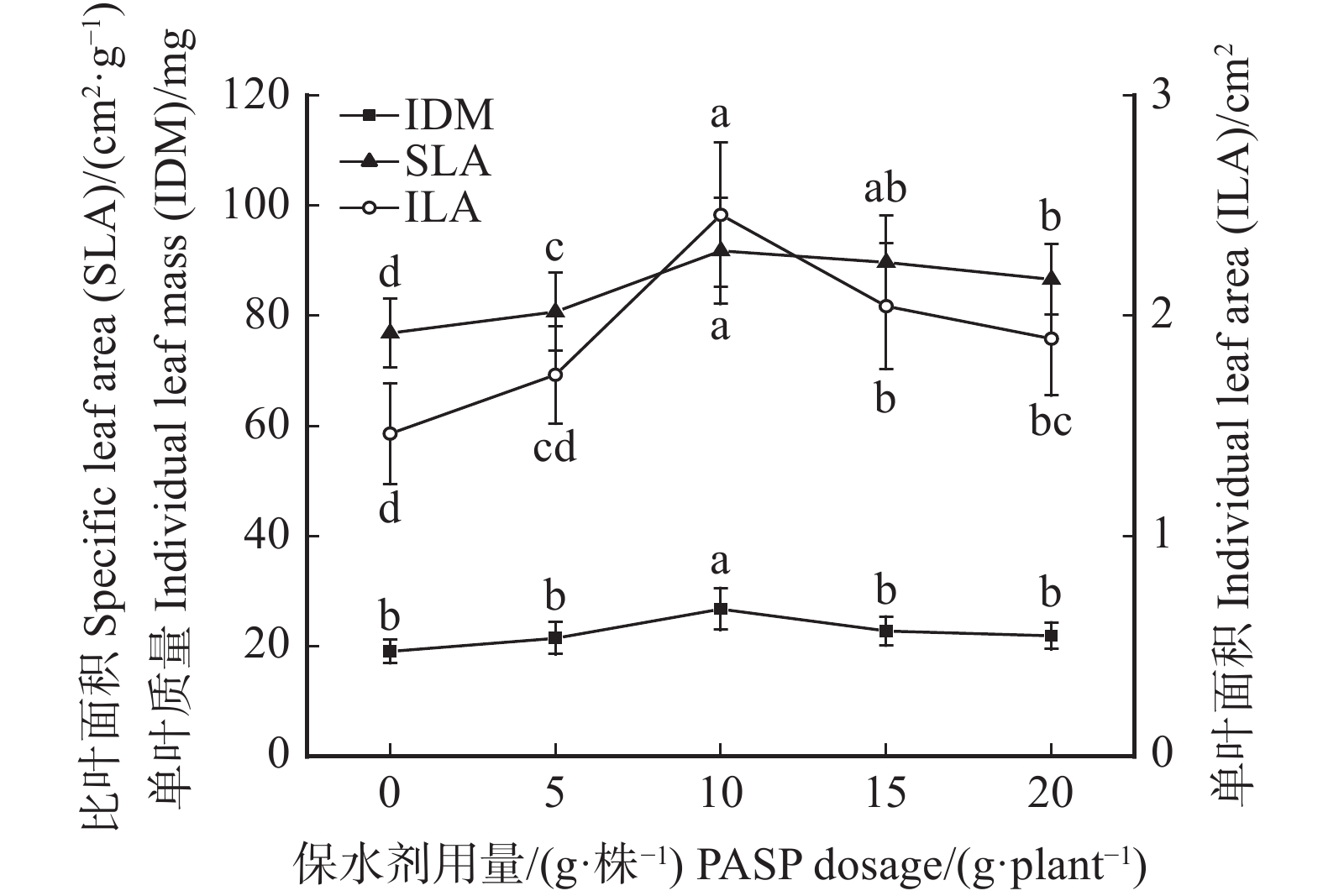
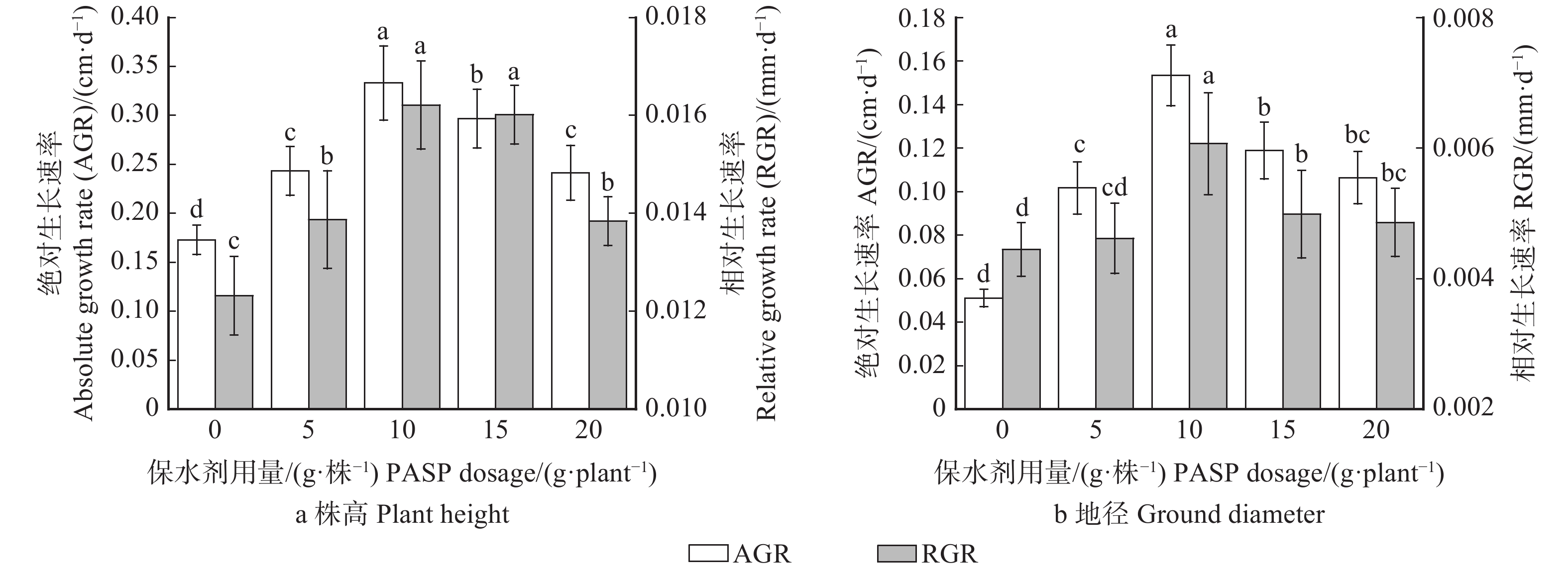
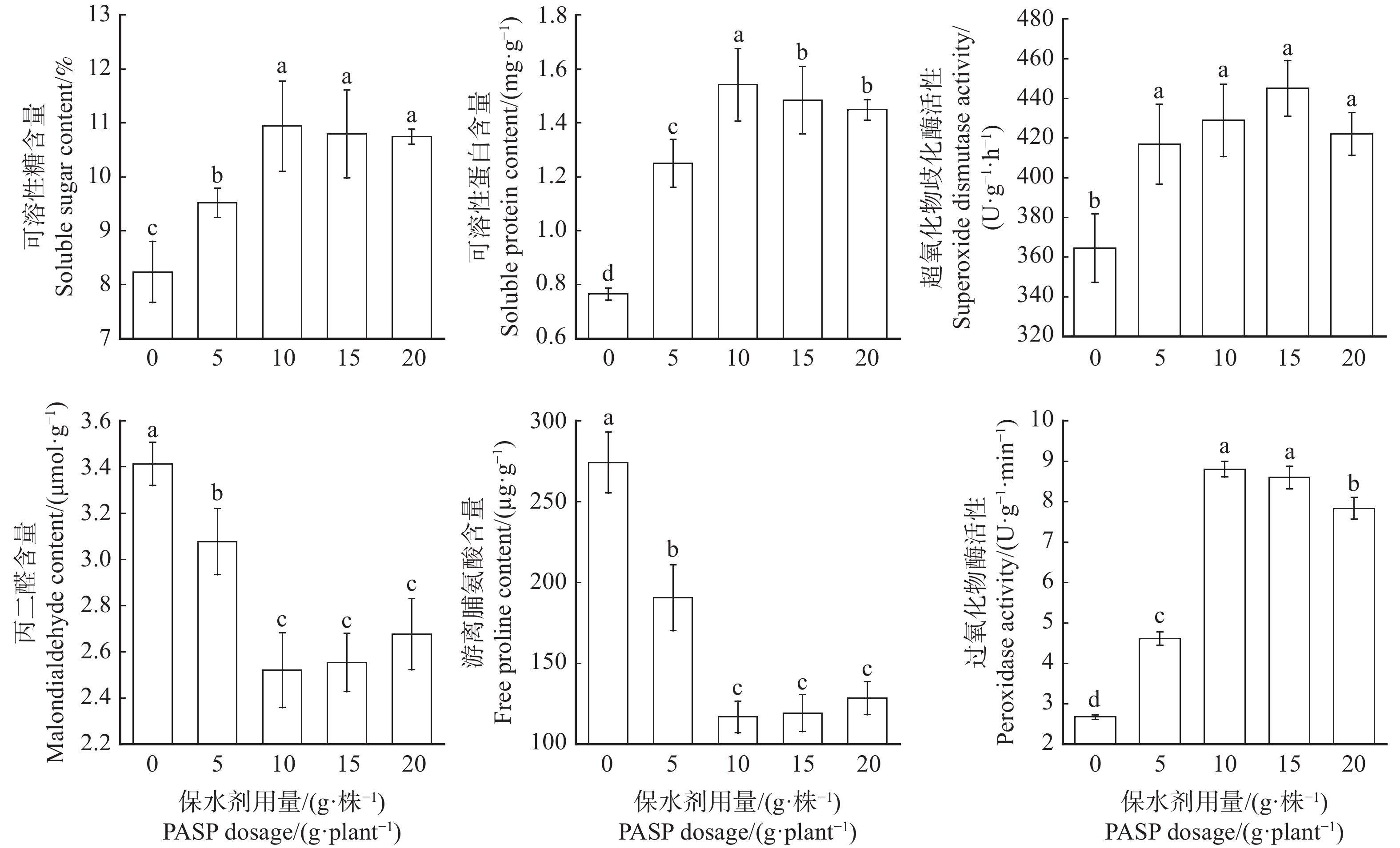
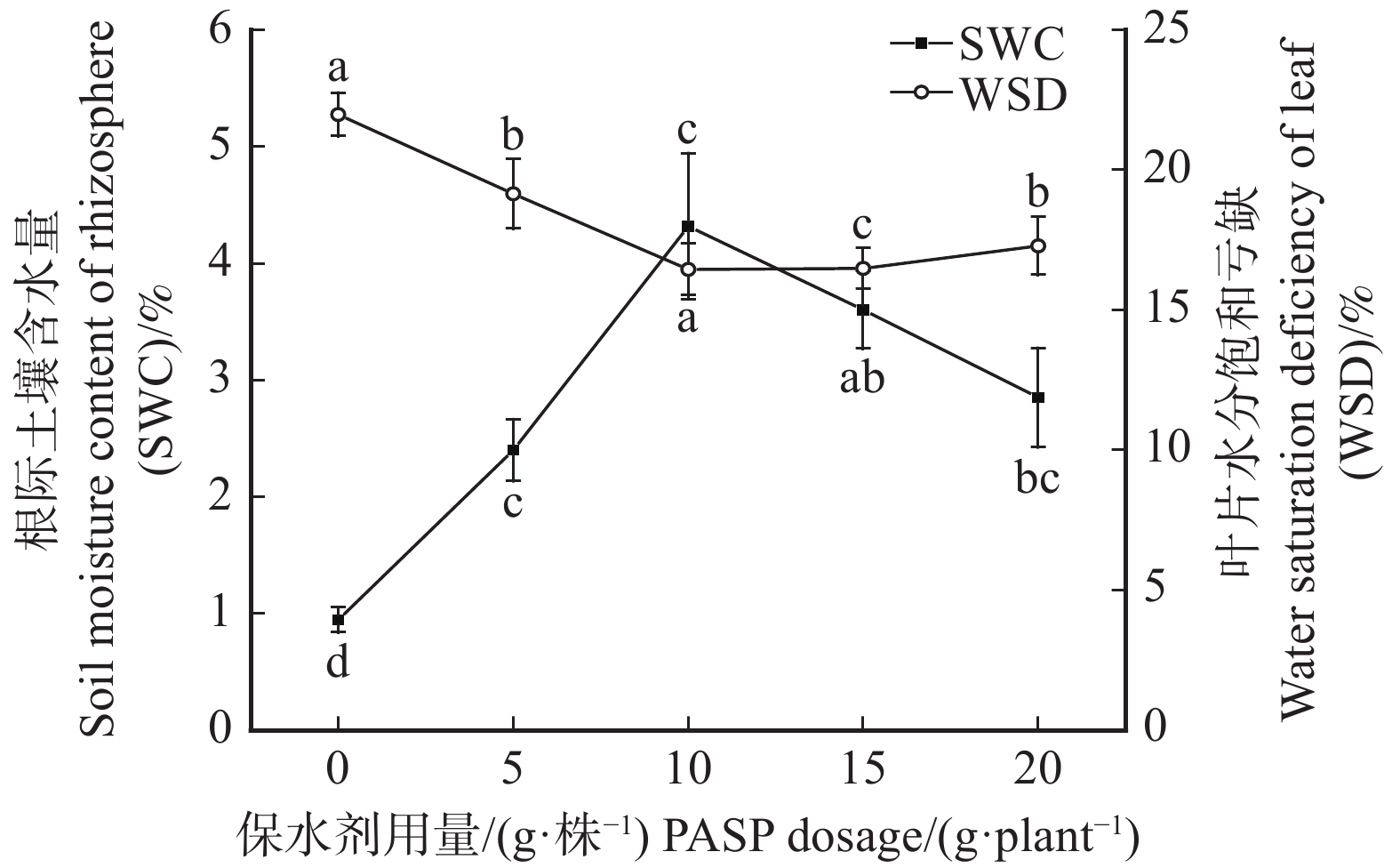
摘要:目的 探究极端干旱区保水剂对荒漠植物生长与生理特性的影响,明确荒漠植物生长所需适宜保水剂用量,促进抗旱保墒造林技术在干旱荒漠区生态恢复中的应用。方法 以胡杨2年生幼苗为研究对象,通过田间干旱试验研究5个聚天冬氨酸(PASP)保水剂用量(0、5、10、15、20 g/株)对胡杨幼苗生长、光合特性、生物量分配和抗逆生理指标的影响,并对其影响效果进行综合评价。结果 (1) 干旱胁迫条件下,根施PASP保水剂可提高胡杨幼苗根际土壤含水量并改善幼苗体内水分状况,增加幼苗株高、地径、新梢生长量、光合器官总量、侧根数量及生长速率,显著促进枝叶生长。(2) 根施PASP有效拓宽胡杨幼苗光照生态幅,提高气孔导度、胞间CO2浓度和光能、水分利用率,降低呼吸消耗,显著提升光合能力和资源利用效率。(3) 根施PASP有效促进胡杨幼苗地上、地下部生物量积累,改变了生物量分配比例,降低了根冠比,显著提高幼苗生物量。(4) 根施PASP显著增加胡杨幼苗叶片可溶性蛋白、可溶性糖含量,提高超氧化物歧化酶和过氧化物酶活性,降低丙二醛含量,提升幼苗渗透调节和抗氧化能力。(5) 利用主成分分析和隶属函数综合评价表明,保水抗旱促生长效果依次为:10 g/株 > 15 g/株 > 20 g/株 > 5 g/株 > CK。结论 在干旱区节水抗旱造林实践中胡杨幼苗最适PASP用量为10 g/株,研究为极端干旱荒漠区植被恢复提供了科学依据与参考。Abstract:Objective This study examined the effects of polyaspartic acid (PASP) dosages on the growth and physiological characteristics of desert plants under drought stress condition, and further to ascertain the suitable PASP dosage for plant growth, aiming to promote the application of drought-relief and moisture-conserving technology for ecological restoration in extreme arid area.Method Two-year-old P. euphratica seedlings were selected as the research object, a field drought experiment was conducted to study the growth, photosynthetic characteristics and drought-resistance physiology of P. euphratica seedlings under different PASP application regimes, and a comprehensive evaluation on their impact efficiency was drawn out.Result (1) Under drought stress condition, root application PASP could enhance the rhizosphere soil moisture and improve the water status of seedlings, and increase the plant height, ground diameter, increment of new shoot, number of photosynthetic organs and lateral roots, and growth rate, to significantly facilitate the growth of branches and leaves. (2) Root application PASP effectively widened light ecological amplitude, and increased stomatal conductance, intercellular CO2 concentration, light energy and water use efficiency, and reduced respiratory consumption, to significantly improve photosynthetic capacity and resource use efficiency of seedlings. (3) Root application PASP effectively promoted the aboveground and underground biomass accumulation, and changed the biomass allocation ratio, and decreased the root shoot ratio, to significantly increase the seedling biomass. (4) Root application PASP significantly increased the concentrations of soluble protein, soluble sugar, and increased the enzyme activity of superoxide dismutase, peroxidase, and decreased the content of malondialdehyde. It strengthened the osmotic regulation and antioxidant capacity of seedlings. (5) A principal component analysis and multivariate data evaluation indicated that the water-retention and growth promotion effect of different PASP dosages were in the order of 10 g/plant > 15 g/plant > 20 g/plant > 5 g/plant > CK.Conclusion In the practice of water-saving and drought-resistant afforestation in arid areas, the most suitable PASP dosage of P. euphratica seedlings is 10 g/plant, which provides scientific basis and reference for vegetation restoration in extremely arid desert areas.
-
无人机因其小巧灵活且具备实时检测能力,在林区巡检和监测领域得到了越来越广泛的应用[1,2]。随着人工林区面积的不断扩大,为了更高效地完成巡检任务并扩大监测范围,以实现病虫害监测和林火灾害预防等功能,提升无人机的自主飞行能力并使其能够执行连续巡检任务变得至关重要[3]。因此,路径规划成为实现无人机自主飞行巡检的关键问题。林区巡检通常涉及多个巡检点,而单一目标的路径规划往往无法满足无人机在林区巡检的任务需求。因此,多目标路径规划成为无人机林区巡检的主要任务之一[4]。其核心目标是规划一条连接多个目标点且无碰撞的路径。在面向林区巡检的多目标路径规划中,需要解决两个关键问题:一是确定访问目标点的最优序列;二是生成各目标点之间无碰撞的路径。此外,为提高巡检效率,还需重点研究如何避免不同路径之间的重复交叉。
在工作环境中,寻找访问所有目标点的最优序列可以视为旅行推销员问题(traveling salesman problem, TSP)的一种应用场景[5]。在经典的TSP中,销售员需要访问若干指定城市,且每个城市仅访问一次。基于给定的城市之间的距离,目标是筛选出一条连接所有城市的最短路径[6]。最短路径从一个指定城市出发,经过所有其他城市后返回起始城市[7]。目前,TSP已受到广泛关注,并发展出许多有效的求解算法,例如启发式算法、遗传算法(genetic algorithm,GA)、模拟退火算法和蚁群算法等[8]。此外,在三维空间中应用遗传算法求解TSP也已取得相关研究成果。例如,Yang等[9]通过改进的遗传算法获得最短路径,并进一步进行分析和建模,基于数据分析和前人研究,提出了最短路径期望长度的回归模型。然而,TSP的研究通常未考虑目标之间路径的避障需求。在实际应用中,路径规划不仅需要确定最佳访问序列,还需要确保目标之间的轨迹无碰撞。例如,Yang等[10]针对机器人在仓库中运送货物的问题,提出了一种基于二维网格模型的路径规划算法,将传统仓库简化为基于节点的二维网格模型,并引入“最大凸多边形”的概念,用于在理想条件下求解遍历所有货物位置的最短路径。为提高求解速度,陈璐等[11]通过改良圈算法优化初始解,并在进化过程中自适应调整遗传操作的概率,结合模拟退火算法和逆转操作,改进了遗传算法在旅行商问题中的应用。韦念念等[12]则通过改进传统的分支定界算法,设计了一种由图嵌入网络、图卷积神经网络、注意力神经网络和多层感知机组成的深度学习模型,用于学习分支规则,该方法在小规模旅行商问题上表现出较好的求解效果。此外,在动态旅行商问题中,刘孟莹等[13]提出了一种探索-利用权衡策略:在环境变化后,先通过模拟退火算法快速获得近优解,再利用自适应轮盘赌选择避免陷入局部极值。尽管已有研究在TSP的求解方法上取得了显著进展,但这些研究大多未涉及路径轨迹的避障问题。因此,对于无人机在复杂环境中的路径规划,不仅要确定最佳访问序列,还需确保路径的无碰撞性,这为路径规划问题带来了新的挑战。
目标之间的避障路径轨迹可以通过多种避障算法来解决。目前,避障算法的研究已取得大量成果,并形成了多种优秀的算法。这些算法主要包括全局路径规划算法(如A*算法和快速探索随机树RRT算法)、局部路径规划算法(如人工势场法和D*算法),以及智能路径规划算法(如粒子群算法PSO、蚁群算法ACO和遗传算法GA)。基于均匀随机采样RRT算法[14]因其概率完备性,已成为全局路径规划中的重要方法,尤其在机器人和无人机领域得到了广泛应用。然而,RRT算法存在一些不足,例如未考虑路径耗散,导致规划路径较为曲折。为解决这些问题,研究者们提出了多种改进方法,例如:RRT-Connect通过双向搜索加快路径规划速度[14]、Q-RRT* [15]、Informed RRT*[16]、BIT* [17] 等变体进一步优化了路径质量和规划效率。此外,吴语等[18]改进了RRT算法,使其适用于离散城市环境,并满足在线航线规划对计算速度的要求;栾添添等[19]提出了一种动态变采样区域路径规划方法,降低了无人车在传统RRT路径规划中的节点搜索盲目性和随机性;Kang等[20]针对RRT-Connect提出了一种基于三角不等式的重新布线方法,进一步加快了规划速度;Wang等[21]提出了一种基于圆弧圆角(CAF-RRT*)的路径规划算法,通过优化路径策略,显著提高了路径质量。尽管这些改进显著提升了RRT算法在复杂环境下的性能,但在多路径规划中,避免路径之间的相互影响仍需进一步研究。
多目标路径规划需要同时解决TSP和避障问题[23]。在传统解决方案中,通常先为每两个目标点之间规划无碰撞路径,然后基于这些路径进行TSP求解,以找到一条连通所有目标点且总路程最短的避障路径[24]。然而,在目标点和障碍物数量众多的复杂环境中,为每对目标点之间构建无碰撞路径的计算成本极高[25]。随着环境复杂度的增加,这种计算负担会急剧上升。由于其复杂性[26],针对林区的无人机多目标路径规划在以往的研究中并不广泛。主要难点在于如何在复杂的林区环境中规划出高质量的无碰撞路径,同时避免不同路径之间的交叉重合。随着环境复杂度的提高和目标点的增加,这一问题的难度呈指数级增长。基于上述分析,本文拟提出一种改进的RRT与GA相结合的多目标路径规划算法,用于无人机林区巡检。首先,在GA中引入自适应调整机制,根据迭代次数动态改变交叉和变异概率,从而使其能够在三维空间中稳定地求解TSP。接着,提出一种绕树策略和靶心策略,对RRT算法进行改进,使其能够根据访问序列向指定目标进行避障路径规划,避免路径向其他目标偏移。最后,提出一种分类策略,并结合连续访问父节点的方法,优化路径中多余的转折和过大的弯曲,同时避免不同目标之间路径的相互干扰。
1. 改进的GA与RRT算法
1.1 林区环境建模
林区环境极其复杂,如图1a所示。在无人机执行巡检任务时,必须覆盖每个巡检点(图1a中标记的红色目标点),并避开错综复杂的障碍物,主要包括树干和树枝。为了使无人机能耗降至最低并实现总路程最短的目标,需要确定一种最优的访问序列来遍历所有巡检点,如图1a中黄色虚线所示的访问顺序。同时,还需避开树干、树枝等复杂障碍物,最终形成一条避障路径,如图1a中绿色曲线所示。目前,本研究考虑的林区障碍因素包括树干、树枝、地面以及林区相关建筑设施等。
根据林区障碍物的分布,搭建仿真林区环境(图1b)。林区环境是根据真实林区模拟生成的,树木的行间距在3 ~ 5 m之间随机分布,树的高度在4 ~ 7 m之间随机生成,每个树干上的树枝数量、大小和方向也各不相同。在传统的多目标路径规划方法中,先为每两个目标点之间规划避障路径的方式存在明显缺陷。当目标点数量较多时,这种方法会显著增加计算成本。因此,本文提出的算法分为两个阶段:第一阶段,遍历所有巡检点,使用改进的GA确定最佳访问序列,在此过程中,不考虑避障问题,仅以两点之间的欧氏距离作为路径成本;第二阶段,使用本文改进的快速探索随机树算法(绕树RRT,BT-RRT),根据第一阶段确定的访问序列规划避障路径,从而求得连通所有目标点的最终访问路径。
1.2 最佳访问序列求解
1.2.1 路径代价计算
在第一阶段,需要求解的最佳访问序列是三维旅行商问题(3D-TSP)。在林区自主巡检时,无人机需访问N个巡检点(目标点)中的每个点一次,最终以最低的总旅行成本返回原点。形式化定义如下:假设存在一个完全连通图G = (V,E),其中V = {0, 1, 2,…,N − 1}表示包含原点在内的N个巡检点的顶点集合;E为任意两个不同点i和j的连线组成边的集合,其中i ≠ j,i∈V, j∈V。每条边(i,j)∈ E与一个权重dij相关联,dij表示巡检点i和j之间的访问成本或距离。由于暂不考虑障碍物避让,因此采用欧氏距离来衡量。
最终目标是规划一条路径,使无人机从原点出发,依次访问每个巡检点一次,并返回原点,同时最小化总旅行成本。3D-TSP的核心在于确定最优的访问顺序,以最小化无人机在返回原点前的飞行距离总和,且每个点在返回原点前仅被访问一次。
3D-TSP的整体规划模型[27]定义如下:引入一个二进制变量xij,表示无人机是否经过边(i, j),当且仅当无人机通过边(i, j)时,xij = 1,其中i ≠ j,i, j∈V;否则,xij = 0。该问题的目标函数是最小化无人机飞行总距离 F。
min (1) 受以下约束条件限制。首先,无人机从编号为0的巡检点(起点)出发,并返回到起点,即
\sum\limits_{j = 1}^{N - 1} {{x_{0j}}} = 1 (2) \sum\limits_{i = 0}^{N - 2} {{x_{i0}}} = 1 (3) 除了0以外的每个需求点,无人机必须恰好访问一次,即
\sum\limits_{j = 1}^{N - 1} {{x_{ij}}} = 1 (4) \sum\limits_{i = 0}^{N - 2} {{x_{ij}}} = 1 (5) 为避免无人机在路径中形成子循环,引入一个决策变量μi, \forall i ∈ V,μi ≥ 0。其中,μi表示巡检点i的访问顺序。例如,当μi = 5时,表示点i是从起点开始访问的第5个点。通过μi确定每个巡检点的访问顺序,从而得出最佳的访问序列。
1.2.2 改进的遗传算法
GA因其良好的全局搜索能力,易于与其他算法结合改进,以及在TSP求解中的广泛应用,被选为第一阶段求解最佳序列的方法。然而,三维空间中的TSP研究并不广泛,其求解结果更加多样化且复杂。在林区巡检任务中,巡检点数量会根据任务动态变化,因此提高3D-TSP求解质量至关重要。
在遗传算法中,交叉操作和变异操作对算法的搜索能力起着关键作用,它们直接影响算法的收敛速度和解的质量。当交叉和变异概率过低时,基因交换次数减少,算法搜索能力下降,可能导致过早收敛,陷入局部最优。相反,当交叉和变异概率过高时,虽然搜索空间增大,但优秀解被破坏的可能性增加,导致效率降低。因此,合理设置交叉和变异概率,以平衡搜索效率和准确性,是优化算法性能的关键。
自适应遗传算法(AGA)通过动态调整交叉和变异概率,克服了传统遗传算法中参数固定的问题。例如,Srinivas等[28]提出的经典AGA算法,根据种群的适应度动态调整交叉概率Pc和变异概率Pm。其调整公式为
{P_{\text{c}}} = \left\{ \begin{gathered} \frac{{{k_1}({f_{\max }} - f')}}{{{f_{\max }} - {f_{avg}}}},f' \geqslant {f_{avg}} \\ {k_2},f' < {f_{avg}} \\ \end{gathered} \right. (6) {P_{\text{m}}} = \left\{ \begin{gathered} \frac{{{k_3}({f_{\max }} - f)}}{{{f_{\max }} - {f_{avg}}}},f \geqslant {f_{avg}} \\ {k_4},f < {f_{avg}} \\ \end{gathered} \right. (7) 式中:fmax为当前种群的最大值,favg为当前种群的平均值,f'为两个交叉对象中适应度函数值较大个体的值,f为要变异个体的值,k1、k2、k3、k4为 0 ~ 1 之间的任意数,通过对k1、k2、k3、k4的设置,在进行遗传操作时便可以自适应调整交叉概率与变异概率的数值。文献[28]通过调节参数,设置k2 = 0.5,k4 = 0.5,以利用种群中适应值低于平均值的个体来搜索全局最优解,同时推荐k1 = 1.0,k3 = 1.0。Srinivas等[28]提出的自适应交叉与变异概率虽然能够根据种群适应度值进行动态调整,但在算法初期,优秀个体的交叉与变异概率可能接近于零。这使得优秀个体在进化过程中过于稳定,难以与其他个体进行有效的基因交换或变异操作。因此,在全局寻优阶段,算法可能因缺乏足够的多样性而陷入局部最优,无法有效找到全局最优解。
本文在已有自适应遗传算法的交叉和变异概率基础上,进一步改进了交叉概率和变异概率的计算公式。具体而言,我们将自适应交叉概率函数映射到指数函数上,将变异概率函数映射到三角函数上,并引入迭代次数对交叉概率的影响。通过这些改进,使交叉概率和变异概率能够更灵活地适应算法的进化过程,从而提升算法的全局搜索能力和收敛性能。具体公式为
{P_{\text{c}}} = \left\{ \begin{gathered} {k_1} \times \frac{1}{{1 + \exp \left( {\dfrac{{(f' - {f_{{\text{avg}}}})}}{{{f_{\max }} - {f_{{\text{avg}}}}}} \times \dfrac{{3g}}{G}} \right)}},f' \geqslant {f_{{\text{avg}}}} \\ {k_2},f' < {f_{{\text{avg}}}} \\ \end{gathered} \right. (8) {P_{\text{m}}} = {k_3} \times \cos \left( {\frac{{(f - {f_{{\text{min}}}})}}{{{f_{\max }} - {f_{{\text{avg}}}}}} \times \frac{\varOmega }{2}} \right) (9) 式中:g为当前迭代次数,G为算法的迭代次数,fmin为当前种群的最小值。通过引入迭代参数,来影响交叉和变异概率,避免了其前期的个体因为适应度较高而导致交叉和变异概率几乎为零的情况,并且适应度越低,其交叉和变异概率越高,随着适应度的增大,交叉和变异概率逐渐减小。在不考虑迭代次数的情况下,参数具体变化值如图2所示。在整个迭代过程中,交叉和变异概率随着迭代次数增加整体呈减小趋势。算法前期以较高交叉概率为主,快速搜索解空间;后期以适度变异概率为主,保护优秀个体的同时增强搜索能力。这种动态调整机制避免了算法因前期个体适应度高而导致交叉和变异概率过低,进而陷入局部最优,从而提高了算法的全局搜索能力和求解质量。
![]() 图 2 交叉(a)、变异(b)概率变化图k2. 调节参数,Pc. 交叉概率;Pm. 变异概率;favg. 当前种群的适应度平均值;f'. 两个交叉对象中适应度较大个体的值;f. 要变异个体的适应度值Figure 2. Graph of crossover (a) and mutation (b) probability variations
图 2 交叉(a)、变异(b)概率变化图k2. 调节参数,Pc. 交叉概率;Pm. 变异概率;favg. 当前种群的适应度平均值;f'. 两个交叉对象中适应度较大个体的值;f. 要变异个体的适应度值Figure 2. Graph of crossover (a) and mutation (b) probability variations1.2.3 改进GA的求解步骤
改进GA的求解分为以下7步,算法流程图如图3所示。
(1)设置种群的大小为 M,初始迭代次数 g,最大迭代次数为 G,选择个体数量为 N,并将交叉概率Pc和变异概率Pm设置为自适应调节参数。
(2)对种群个体进行实数编码,采用贪心算法和替换策略初始化种群,生成初始种群 pop。
(3)计算每个个体的适应度函数值。
(4)选择操作:采用轮盘赌法进行选择,将适应度值转化为选择概率并映射到轮盘赌过程中,适应度较高的个体具有更大的选择概率,从而更有可能被选为父代个体进行交叉操作,以保留优良基因。
(5)交叉操作:使用多点交叉方式,交叉概率根据式(8)计算。
(6)变异操作:使用基本位变异方式,变异概率根据式(9)计算。
(7)判断是否满足停止条件,若满足则输出最优解,否则返回第(3)步继续执行。
1.2.4 3D-TSP规划
在此示例中(图4),共有9个巡检点,通过改进的GA获得了最优序列。图4中的蓝线表示最短路径,该路径仅基于巡检点之间的欧氏距离计算,未考虑障碍物,因此图中多处路线穿越了障碍物。在获得最佳访问序列后,后续将按照此序列进行避障路径规划。
1.3 避障路径规划
1.3.1 避障路径代价计算
在得到最佳访问序列后,进入第二阶段,根据该序列进行目标点之间的避障路径规划。在第一阶段,路径距离成本dij仅基于欧氏距离计算,忽略了障碍物的存在。而在第二阶段,考虑到障碍物的影响,路径代价采用避障后的实际代价Dij。此时,新的目标函数更改为最小化无人机避障路径长度F2。
\min {F_2} = \sum\limits_{i = 0}^{N - 2} {\sum\limits_{j = 1}^{N - 1} {{D_{ij}}} } {x_{ij}} (10) 在考虑避障后,真实的无人机路径可以视为由一系列坐标点连接而成的线段。因此,采用实数编码方式对路径进行编码,其表示为(xi, yi, zi),其中xi、yi、zi分别表示第i个航迹点在 x、 y 和 z 轴上的坐标,i = 1, 2, …, n,n为路径节点的数量。
需要避开的障碍物主要为树干和树枝,本研究采用不同大小、位置、方向的圆柱体进行建模(如图1所示)。这些圆柱体的数学表示为
\Gamma \left( \varepsilon \right) = {\left( {\frac{{(x - {x_0})}}{a}} \right)^{2d}} + {\left( {\frac{{(y - {y_0})}}{b}} \right)^{2e}} + {\left( {\frac{{(z - {z_0})}}{c}} \right)^{2f}} _{ } (11) 式中:(x0,y0,z0)为干扰中心的坐标,参数 a = b,d = e = 1,f > 1;当 \Gamma \left( \varepsilon \right) = 1时,所有点围成的曲面是一个圆柱,其中(x0,y0,z0)为该圆柱体的中心坐标。
假设环境模型中有m个圆柱体障碍物,用rk表示第k个圆柱体的半径,其中k∈{1, 2, …, m}。第k个圆柱体的中心高线为线段Hk,其两个端点的坐标分别为(xk1, yk1, zk1)和(xk2,yk2,zk2),其中k∈{1, 2, …, m}。为了避免路径与障碍物发生碰撞,规划出的路径需要满足避障约束。
\left\{ \begin{gathered} {L_{ik}} = \frac{{\left| {\left( {{x_{k1}}{\text{ }} - {\text{ }}{x_{\text{i}}},{\text{ }}{y_{k1}}{\text{ }} - {\text{ }}{y_i},{\text{ }}{z_{k1}}{\text{ }} - {\text{ }}{z_i}} \right){\text{ }} \times \left( {{x_{k2}}{\text{ }} - {\text{ }}{x_2},{\text{ }}{y_{k2}}{\text{ }} - {\text{ }}{y_2},{\text{ }}{z_{k2}}{\text{ }} - {\text{ }}{z_2}} \right)} \right|}}{{\left| {\left( {{x_{k2}}{\text{ }} - {\text{ }}{x_{k1}},{\text{ }}{y_{k2}}{\text{ }} - {\text{ }}{y_{k1}},{\text{ }}{z_{k2}}{\text{ }} - {\text{ }}{z_{k1}}} \right)} \right|}},\; k \in m,\; i \in n \\ \mu {{\text{r}}_k} \leqslant {L_{ik}},\quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad k \in m,\; i \in n \\ \end{gathered} \right. (12) 式中: × 表示叉乘(外积);|…| 表示向量的长度;Lik表示第i个航迹点到第k个圆柱中心线段的距离;μ为膨胀系数,本文取1.5,使航迹点到障碍物的距离不得小于最小安全距离。
在满足所有约束条件后,设每两个目标点之间的路径代价为Dij,路径上共有pij个航迹点,最终形成的航迹长度即为真实的路径代价Dij。
{D_{ij}} = \sum\limits_{i = 1}^{{p_{ij}}} {\sqrt {{{({x_{i + 1}} - {x_i})}^2} + {{({y_{i + 1}} - {y_i})}^2} + {{({z_{i + 1}} - {z_i})}^2}} } (13) 1.3.2 靶心策略
传统的RRT算法在空间中随机生成采样点(如图5a所示),其中绿色的点均为采样点。虽然这种随机生成的方式可以实现避障效果,但容易偏离目标。理想情况下,每一个采样点都应朝着目标点goal Ⅰ生成,然而传统RRT算法为了避障而随机生成采样点,很容易偏移至另一个目标点goal Ⅱ。在多目标路径规划中,这种偏移会对最终路径的质量产生极大影响。为了解决这一问题,使采样点更好地朝着理想目标进行避障规划,而不向其他目标偏移,本文引入了靶心策略(如图5b所示)。该策略从起始点start point出发,将下一个目标点goal Ⅰ设定为靶心G1。每次生成的采样点只能在靶心及其周围范围内随机分布,例如可能生成的采样点为G1、G2、G3等。这些采样点的生成受到概率函数P的约束,其表达式如式(14)所示。该概率函数P规定,采样点与靶心的距离d越远,其生成的概率越小,反之亦然。通过这种方式,可以使规划出的路径最大程度地贴合第一阶段的直线路径,从而降低向其他目标偏移的概率。
P = \frac{1}{{{e^{(d/k)}}}} (14) 式中:d 为与目标点偏移的距离;k为调节参数,根据树干直径调整,本文取0.75倍树干直径。
1.3.3 绕树策略
引入靶心策略虽能朝着下一个目标点采样,但遇到障碍物时,受靶心策略约束,无法避开。因此,本文提出绕树策略(如图6a)。当采样点rand point生成于障碍物内,或路径穿过障碍物(如图6a中绿色虚线路径)时,将该采样点推出障碍物。推出方向分为10种(如图6b):垂直于树干轴截面(xy平面)有8种方向,沿树干轴方向(z轴)有2种。在本文搭建的环境中,经训练模拟,采样点被推出的距离取1.25倍步长较为合适。推出后的采样点为新采样点new point,与父节点连接。若new point仍在障碍物内,或其与父节点的连接路径检测到碰撞,则继续将new point往外推,循环此过程,直至检测到无碰撞路径,从而绕开障碍物。
1.3.4 连续选择父节点
经过绕树策略后,被推出障碍物的采样点new point与其父节点parent point连接时,路径会产生较大偏折,转向角α增大,路径代价也随之增加(图7a)。因此,本文在采样点访问父节点的同时,进一步访问父节点的父节点(祖父节点grandparent point),即每次采样点同时访问父节点和祖父节点。如果采样点与祖父节点连接后的路径代价小于当前与父节点连接的路径代价,则删除父节点,直接连接祖父节点(如图7b)。这一方法可显著降低路径偏折,减少路径代价。
1.3.5 分类树
为避免这种情况,本文提出分类树方法。每两个目标点之间的避障路径规划被划分为一个独立的搜索树类别。在每一类搜索树中,采样点只能搜索同类别树上的节点。例如,目标点goal Ⅰ与goal Ⅱ之间的路径为Ⅰ类树,对应蓝色路径;目标点goal Ⅱ与goal Ⅲ之间的路径为Ⅱ类树,对应红色路径(图8b)。不同类别的路径间节点搜索互不影响,从而避免路径重合。
1.3.6 3次B样条曲线优化
经过连续访问父节点后,路径的平滑度提高,总节点数减少,转弯点数量、总转弯角度和路径长度也随之减少。然而,由于存在一些必要的拐角,路径的平滑度仍未达到理想状态。B样条曲线作为一种特殊的样条曲线,具有凸包性、几何不变性、局部支座性和非负性等优点,能够灵活地平滑路径[29],更好地适应各种实际轨迹要求。为确保优化后的路径包含起始点和目标点,并保持连续的平滑度,本文采用准均匀3次B样条曲线对路径进行平滑处理。然而,过度光滑可能导致路径与障碍物发生碰撞的风险。为此,研究中对障碍物体积进行了膨胀,膨胀系数μ取前文的1.5,以确保经准均匀3次B样条曲线处理后的路径不会与障碍物相撞。
2. 仿真验证
为了验证本算法在多目标路径规划中的有效性,进行了一系列仿真试验。试验搭建了简单环境和复杂环境两种不同的林区地图(图9、10),并根据环境大小设置不同数量的巡检点进行对比。当巡检点数量达到9个时,巡检区域可覆盖大部分地图,且分布不会过于密集,从而在目标点数量较多时更好地检验算法的避障性能。简单环境中树木障碍物数量较少、间隙较大、分布稀疏;而复杂环境中树木障碍物数量较多、间隙较小、分布密集。
为了凸显本算法的避障优势,选用三维空间搜索效果较好的RRT算法、蚁群算法(ACO)和粒子群算法(PSO)进行对比,主要对比搜索时间、路径耗散和路径质量等指标。在这些环境中,工作空间是完全已知的,且假设障碍物为静态。PSO和ACO算法的搜索时间以达到最优适应度所消耗的时间为准。所有仿真均在配置为英特尔(TM)Core(TM)i7-12700H 2.70 GHz和16GB RAM的笔记本电脑上进行,采用Matlab编程实现。
2.1 简单环境仿真试验
为了充分体现本算法的性能,先将避障环境简化为9棵树(3 × 3)的林区环境(图9),分别设置3、6、9个巡检点进行多目标路径规划,数据结果取运行20次的平均值。从最终生成的路径质量来看,所有算法均能达到避障效果。然而,由于林区障碍物复杂,PSO算法生成的路径较为曲折,RRT算法存在较大迂回路径。本文改进的BT-RRT算法引入靶心策略,约束路径生成方向,避免了迂回现象。ACO算法随着目标点数量增加,甚至出现路径交叉现象。而本算法采用绕树策略和连续选择父节点策略,显著减少了路径转折。针对林区障碍物复杂导致随机生成采样点易陷入障碍物的问题,本文直接使采样点朝向下一个目标生成,若在障碍物内则将其推出,减少了重复生成采样点的时间,提高了计算效率。同时,通过连续选择父节点避免了过大转折角,进一步降低了路径代价。
在简单环境中,树木障碍物稀疏,4种算法的路径耗散差距不大,但本算法的路径耗散始终最少(表1)。在搜索时间方面,PSO和ACO算法因需不断迭代以获取最优结果,耗时较长;而BT-RRT和传统RRT直接搜索路径,耗时较短。当巡检点从3个增加到6个时,PSO、ACO、RRT和BT-RRT算法的搜索时间分别增加了74.47%、53.73%、9.42%和4.56%;从3个增加到9个时,搜索时间分别增加了173.63%、155.51%、67.13%和21.90%。从受到目标点数量和环境复杂度的影响来看,BT-RRT对树木障碍物的适应能力更强。
表 1 简单环境中各算法的搜索时间和路径耗散Table 1. Search time and path dissipation of various algorithms in simple environments算法名称 巡检点数量 搜索时间/s 路径耗散/m PSO 3 40.565 62.169 6 70.773 80.303 9 110.996 96.200 ACO 3 70.695 68.965 6 108.677 86.732 9 180.632 99.802 RRT 3 7.530 67.778 6 8.239 85.609 9 12.585 98.163 BT-RRT 3 6.735 60.999 6 7.042 75.848 9 8.210 86.960 2.2 复杂环境仿真试验
本文的绕树RRT(BT-RRT)算法是针对复杂林区环境改进的。通过提升模拟环境复杂度,采用25棵树(5 × 5)构建林区环境,更能体现算法在多目标路径规划中的优势。实验数据取运行20次的平均值。从图10可见,其他算法在复杂环境中生成的路径明显变得曲折,尤其在巡检点数量达到9个时(图10c),PSO和ACO算法路径出现扭曲折叠,ACO甚至出现路径交叉,RRT算法出现路径重合(图10b),路径质量随目标点增多显著下降。而BT-RRT算法由于引入靶心策略,每条路径均朝向下一个目标点生成,避免了路径交叉。在分类树策略下,各路径间搜索互不影响,解决了RRT算法采样点重合导致的路径重合问题。同时,配合绕树和连续选择父节点策略,实现了避障效果,消除了路径迂回,保持了路径质量。此外,本文还引入3次B样条曲线对路径进行平滑处理,进一步减小路径长度和转角数量。
在复杂环境中,树木障碍物极为密集,4种算法的路径耗散和搜索时间差距显著增大。本算法在搜索时间和路径耗散上表现出明显优势(如表2)。当巡检点从3个增加到6个时,PSO、ACO、RRT和BT-RRT算法的搜索时间分别增加了96.28%、102.27%、66.24%和48.86%;从3个增加到9个时,搜索时间分别增加了221.77%、332.42%、184.78%和102.35%。在复杂环境中,本算法对目标点数量增加的适应性更强。此外,当巡检点数量固定时,环境从简单变为复杂,本算法受到的影响最小。
表 2 复杂环境中各算法的搜索时间和路径耗散Table 2. Search time and path dissipation of various algorithms in complex environments算法名称 巡检点数量 搜索时间/s 路径耗散/m PSO 3 173.751 65.443 6 341.034 80.309 9 559.073 91.812 ACO 3 230.439 66.108 6 466.112 95.151 9 996.472 112.652 RRT 3 24.656 65.313 6 40.989 92.656 9 70.215 104.385 BT-RRT 3 12.302 62.772 6 18.313 70.891 9 24.893 78.539 2.3 仿真结果分析
通过绘制曲面图直观展示4种算法在不同环境复杂度和巡检点数量下的搜索时间(如图10)。简单环境复杂度设为1,复杂环境设为2。由图11a、11b可知,PSO和ACO算法受巡检点数量和环境复杂度的影响显著,随着两者的增加,搜索时间急剧上升。这表明传统PSO和ACO算法在复杂环境下的多目标路径规划存在明显缺陷。而由图11c、11d可见,本算法对多目标路径规划进行了改进,受巡检点数量和环境复杂度的影响显著降低。
不考虑路径质量,仅从规划时间来看,本算法优于传统RRT,且更适应林区障碍物环境。本算法通过改变随机采样方式,仅朝向下一个目标点采样,若采样点位于障碍物内,则将其推出障碍物,避免了对空间中其他障碍物的无用采样,从而大幅降低了采样时间。由于障碍物形状未知,本文采用10种固定方向将采样点推出障碍物,虽然可以实现推出,但可能陷入非最优方向。后续可重点研究根据障碍物形状及采样点与障碍物的相对位置来优化推出方向。
在路径耗散方面,本算法相较于其他3种算法显著降低,且随着环境复杂度和巡检点数量的增加,优势愈发明显。本算法在靶心策略下,路径几乎不向其他方向偏折,通过连续选择父节点去除了避障形成的多余转折角,并借助3次B样条曲线优化,进一步减少了路径耗散。图12显示,在不同环境复杂度和巡检点数量下,本算法的路径耗散均低于其他3种算法。例如:在包含9个巡检点的复杂环境中,由表2可得,PSO、ACO和RRT算法的路径耗散分别为91.812、112.652和104.385 m,而本算法的路径耗散仅为78.539 m,相比上述3种算法分别降低了14.46%、30.28%和24.76%。
林区环境极为复杂,本文仅针对静态林区环境进行了避障规划。然而,真实的林区中存在诸多不确定因素,如活动的动物、飞鸟、工作人员等动态障碍物。如何避开这些动态障碍物是林区路径规划的一大难点。将静态障碍物与动态障碍物相结合,在完成全局最优路径规划的基础上,对局部动态障碍物进行实时避障调整,将是本文后续研究的重点。
3. 林区点云真实环境验证
在仿真中,本算法取得了良好结果。为检验其在真实林区巡检中的飞行效果,选取北京市海淀区八家公园内的榆树林区(如图13a)作为测试场地。通过三维激光雷达扫描生成点云地图,该地图与真实林区的复杂情况高度匹配,包括树木的形状、位置、行间距、大小,树枝的状态、长短、粗细,地面起伏程度以及林区相关设施等(如图13b)。随后,在ROS平台下,利用PX4飞控系统搭载3D激光雷达传感器,开展了无人机在林区点云上的模拟巡检飞行。
将PX4飞控系统搭建完成并载入林区点云地图(如图14a),随后搭载3D激光雷达(如图14b),其感知范围为5 m。将检测到的点云进行栅格化建图,用于障碍物识别与路径规划。未检测到的点云区域显示为黑色,表示未知区域。
在模拟巡检飞行中,记录了无人机在不同时刻到达不同巡检点的飞行状态(如图15)。结果表明,本算法能够沿着所求的最优序列安全到达每一个巡检点,避开所有林区障碍物,且路径无迂回和交叉。
4. 结 论
本文针对人工林区无人机巡检任务规划问题,融合改进了快速随机扩展树算法(RRT)和遗传算法(GA),提出了一种多目标路径规划算法。通过引入迭代次数自适应调整GA的交叉和变异概率,引入靶心和绕树策略改进RRT,并采用分类树方法避免路径交叉重合,算法在复杂林区环境中表现出色。仿真验证表明,本算法能够高效遍历所有目标点,求解最优访问序列,并快速生成高质量、无碰撞的连通路径。与粒子群算法(PSO)、蚁群算法(ACO)和RRT算法对比,本算法在不同数量的巡检点(3、6、9个)和不同复杂度环境下均展现出显著优势。研究结论如下。
(1)路径质量方面,本算法规划的路径无交叉重合、迂回或巨大转折现象。
(2)时间消耗方面,本算法用时最短。在复杂环境中,当巡检点从3个增加到9个时,PSO、ACO、RRT和本算法的搜索时间分别增加了221.77%、332.42%、184.78%和102.35%。
(3)路径耗散方面,本算法路径长度最短。在9个巡检点的复杂环境中,PSO、ACO、RRT算法的路径耗散分别为91.812、112.652和104.385 m,而本算法仅为78.539 m,分别降低了14.46%、30.28%和24.76%。
(4)本算法在ROS平台上通过无人机搭载PX4飞控系统和3D激光雷达进行模拟巡检飞行,成功遍历所有巡检点并避开林区障碍,验证了其在林区巡检中的有效性和可行性。
然而,当前研究仅针对静态林区环境,主要集中在固定障碍物(如树木、地形)的避障路径规划。未来研究需重点关注动态林区障碍物的避障策略,例如野生动物的活动、行人穿行等突发情况。这些动态因素不仅增加了路径规划的复杂性,还可能对无人机的安全飞行和巡检任务的连续性带来挑战。此外,随着无人机在林区巡检任务中的应用日益广泛,多机协同巡检的策略也亟待研究。通过多机协同,可以提高巡检效率,覆盖更广泛的区域,同时需要解决无人机之间的通信、任务分配以及协同避障等问题。因此,未来的路径规划研究不仅要考虑单一无人机的动态避障能力,还需探索多机协同作业下的高效路径规划方法,以更好地适应复杂多变的林区环境,同时兼顾生态保护和野生动物安全。
-
![]()
图 1 保水剂用量对胡杨幼苗根际土壤含水量的影响
不同小写字母表示处理间差异显著(P < 0.05)。下同。Different lowercase letters indicate significant difference among varied treatments (P < 0.05). The same below.
Figure 1. Effects of PASP dosage on rhizosphere soil watercontent of P. euphratica seedlings
![]()
图 2 保水剂用量对胡杨幼苗生长的影响
Figure 2. Effects of PASP dosage on growth of P. euphratica seedlings
![]()
图 3 保水剂用量对胡杨幼苗株高、地径生长速率的影响
Figure 3. Effects of PASP dosage on growth rates of plant height and ground diameter for P. euphratica seedlings
![]()
图 4 保水剂用量对胡杨幼苗叶片抗逆生理指标的影响
Figure 4. Effects of PASP dosage on physiological indexes of stress resistance for P. euphratica seedlings
表 1 保水剂用量对胡杨幼苗生长的影响
Table 1 Effects of PASP dosage on growth of P. euphratica seedlings
PASP用量/
(g·株−1)
PASP dosage/
(g·plant−1)株高
Plant height/cm地径
Ground diameter/mm新梢 New shoot 根系 Root 长度
Length/cm直径
Diameter/mm干质量
Dry mass/g总叶面积
Total leaf area/cm2一级侧根数
Number of primary lateral root根长
Root length/cm二级侧根数
Number of secondary lateral root0(CK) 156.5 ± 11.46d 14.46 ± 1.47d 23.72 ± 3.11b 1.09 ± 0.05c 0.52 ± 0.04c 25.91 ± 3.15b 6.6 ± 2.12e 24.1 ± 3.12b 28.6 ± 3.57d 5 179.3 ± 15.21c 26.61 ± 2.66bc 24.63 ± 3.39b 1.33 ± 0.06b 0.54 ± 0.08c 31.68 ± 3.22b 10.0 ± 1.23d 21.1 ± 3.37b 56.2 ± 6.12c 10 217.3 ± 12.35a 31.03 ± 3.02a 31.47 ± 4.84a 1.51 ± 0.08a 0.82 ± 0.02a 39.78 ± 4.92a 14.1 ± 2.51b 32.4 ± 5.16a 120.1 ± 12.62a 15 195.9 ± 16.87b 28.23 ± 1.92b 30.83 ± 4.41a 1.43 ± 0.02ab 0.68 ± 0.06b 33.36 ± 4.36b 16.4 ± 2.84a 29.5 ± 4.32a 121.4 ± 13.23a 20 182.9 ± 14.14c 25.91 ± 2.51c 31.07 ± 3.92a 1.41 ± 0.07ab 0.67 ± 0.07b 31.77 ± 4.13b 12.7 ± 1.77c 30.1 ± 4.18a 95.7 ± 8.34b 注:同列不同小写字母表示处理间差异显著(P < 0.05)。下同。Notes: different lowercase letters indicate significant difference among varied treatments on same column (P < 0.05). Same as below.  下载: 导出CSV
下载: 导出CSV
表 2 保水剂用量对胡杨幼苗光合气体交换与资源利用效率的影响
Table 2 Effects of PASP dosage on gas exchange and resource use efficiency of P. euphratica seedlings
PASP用量/(g·株−1)
PASP dosage/(g·plant−1)净光合速率
Net photosynthetic
rate(Pn)/
(μmol·m−2·s−1)气孔导度
Stomatal conductance(Gs)/
(mol·m−2·s−1)胞间CO2浓度
Intercellular CO2 concentration(Ci)/
(μmol·mol−1)蒸腾速率
Transpiration
rate (Tr)/
(mmol·m−2·s−1)光能利用率
Light use efficiency (LUE)水分利用率
Water use efficiency(WUE)/
(mmol·mol−1)0(CK) 11.41 ± 1.432d 0.158 ± 0.011c 204.56 ± 17.736c 8.61 ± 0.541c 0.008 ± 0.0009c 1.325 ± 0.129c 5 15.44 ± 1.771c 0.161 ± 0.015bc 238.67 ± 24.568b 9.28 ± 0.603bc 0.027 ± 0.0005b 1.568 ± 0.164b 10 22.27 ± 2.378a 0.223 ± 0.008a 252.78 ± 22.593a 11.57 ± 0.881a 0.047 ± 0.0058a 1.925 ± 0.225a 15 21.32 ± 1.958a 0.182 ± 0.014b 244.06 ± 19.109ab 11.64 ± 0.732a 0.042 ± 0.0042a 1.832 ± 0.128a 20 17.71 ± 2.153b 0.167 ± 0.013c 236.54 ± 22.319b 10.29 ± 0.784ab 0.032 ± 0.0038b 1.721 ± 0.142ab
下载: 导出CSV
表 3 保水剂用量对胡杨幼苗光合作用−光响应参数的影响
Table 3 Effects of PASP dosage on light response parameters of P. euphratica seedlings
PASP用量/
(g·株−1)
PASP dosage/
(g·plant−1)初始量子效率
Initial quantum efficiency最大净光合速率
Maximum net
photosynthetic rate
(Pnmax)/(μmol·m−2·s−1)光饱和点
Light saturation point(LSP)/
(μmol·m−2·s−1)光补偿点
Light compensation point (LCP)/
(μmol·m−2·s−1)暗呼吸速率
Dark respiration rate (Rd)/(μmol·m−2·s−1)0(CK) 0.053 ± 0.0047a 23.09 ± 2.119d 1 569.53 ± 78.92c 54.25 ± 4.269a 2.42 ± 0.232a 5 0.056 ± 0.0039a 23.42 ± 2.327d 1 631.34 ± 45.67c 44.99 ± 3.835b 2.32 ± 0.209ab 10 0.061 ± 0.0053a 36.68 ± 3.466a 1 942.07 ± 67.89a 27.64 ± 2.533e 1.63 ± 0.146d 15 0.058 ± 0.0024a 34.15 ± 3.271b 1 857.89 ± 60.56a 31.53 ± 2.696d 1.84 ± 0.162c 20 0.059 ± 0.0041a 27.10 ± 2.548c 1 749.29 ± 78.34b 38.22 ± 3.531c 2.19 ± 0.201b
下载: 导出CSV
表 4 保水剂用量对胡杨幼苗生物量积累与分配的影响
Table 4 Effects of PASP dosage on biomass accumulation and allocation of P. euphratica seedlings
指标
IndexPASP用量/(g·株−1) PASP dosage/(g·plant−1) 0(CK) 5 10 15 20 总生物量 Total biomass/g 138.41 ± 11.359d 500.61 ± 41.479c 661.24 ± 62.943a 638.55 ± 55.361a 570.44 ± 53.903b 根生物量 Root biomass/g 44.53 ± 4.086d 129.01 ± 10.756c 132.62 ± 9.875c 161.69 ± 14.393a 148.63 ± 12.615b 茎生物量 Stem biomass/g 72.42 ± 6.075e 290.52 ± 19.441d 413.17 ± 30.445a 371.12 ± 28.234b 322.81 ± 24.315c 叶生物量 Leaf biomass/g 21.46 ± 1.838e 81.08 ± 6.756d 115.45 ± 10.225a 105.76 ± 6.694b 98.99 ± 8.377c 根生物量比 Root biomass ratio 0.322 ± 0.030a 0.258 ± 0.019b 0.207 ± 0.016c 0.253 ± 0.028b 0.261 ± 0.032b 叶生物量比 Leaf biomass ratio 0.155 ± 0.009b 0.162 ± 0.011ab 0.175 ± 0.013a 0.166 ± 0.007ab 0.174 ± 0.015a 茎生物量比Stem biomass ratio 0.523 ± 0.021c 0.580 ± 0.038ab 0.625 ± 0.041a 0.581 ± 0.035ab 0.566 ± 0.017bc 根冠比 Root shoot ratio 0.474 ± 0.042a 0.347 ± 0.036b 0.254 ± 0.018c 0.339 ± 0.023b 0.352 ± 0.028b 叶面积比率 Leaf area ratio/(cm2·g−1) 43.53 ± 4.031c 51.08 ± 4.635bc 61.56 ± 5.813ab 65.39 ± 6.216a 58.32 ± 4.225ab
下载: 导出CSV
表 5 胡杨幼苗生长与生理生化指标主成分分析
Table 5 Principal component analysis on growth and physiological indexes for P. euphratica seedlings
指标
Index因子载荷 Factor loading H GD BS T S R/S HRGR SLA WSD Pn Gs Tr PC1 0.967 0.954 0.960 0.959 0.974 −0.937 0.971 0.982 −0.978 0.991 0.805 0.957 PC2 −0.006 0.229 0.076 0.279 0.211 −0.053 −0.017 −0.104 −0.166 −0.072 −0.535 −0.154 指标
Index因子载荷 Factor loading 特征根
Eigenvalue贡献率
Contribution rate/%WUE Pnmax LSP LCP Rd SS SP SOD POD MDA PC1 0.999 0.898 0.962 −0.995 −0.919 0.962 0.963 0.908 0.965 −0.98 20.048 91.128 PC2 −0.005 −0.409 −0.258 0.076 0.382 0.183 0.264 0.344 0.038 −0.067 1.150 5.228 注:H.株高;GD地径;BS.新梢长;T.总生物量;S.地上生物量;R/S.根冠比;HRGR.株高相对生长速率;SLA.比叶面积。Notes: H, plant height; GD, ground diameter; BS, new shoot length; T, total biomass; S, aboveground biomass; R/S, root shoot ratio; HRGR, relative growth rate of plant height; SLA, specific leaf area.
下载: 导出CSV
表 6 隶属函数法对不同用量PASP施用效果的综合评价
Table 6 Comprehensive evaluation of application effect with different PASP dosages by subordinate function method
指标
IndexPASP用量/(g·株−1)
PASP dosage/(g·plant−1)0(CK) 5 10 15 20 隶属函数值
Membership function value0.045 5 0.406 0 0.945 4 0.820 1 0.624 9 排序 Order 5 4 1 2 3
下载: 导出CSV
-
[1] 王曦, 胡红玲, 胡庭兴, 等. 干旱胁迫对桢楠幼树渗透调节与活性氧代谢的影响及施氮的缓解效应[J]. 植物生态学报, 2018, 42(2): 240−251. doi: 10.17521/cjpe.2017.0225 Wang X, Hu H L, Hu T X, et al. Effects of drought stress on the osmotic adjustment and active oxygen metabolism of Phoebe zhennan seedlings and its alleviation by nitrogen application[J]. Chinese Journal of Plant Ecology, 2018, 42(2): 240−251. doi: 10.17521/cjpe.2017.0225
[2] 曹德昌. 额济纳绿洲胡杨种群繁殖特性研究[D]. 北京: 北京林业大学, 2009. Cao D C. Reproductive characteristics of Populus euphratica in Ejina Oasis [D]. Beijing: Beijing Forestry University, 2009.
[3] Bogeat-Triboulot M B, Brosché M, Renaut J, et al. Gradual soil water depletion results in reversible changes of gene expression, protein profiles, ecophysiology, and growth performance in Populus euphratica, a poplar growing in arid regions[J]. Plant Physiology, 2007, 143(2): 876−892. doi: 10.1104/pp.106.088708
[4] Li J Y, Zhao C Y, Li J, et al. Growth and leaf gas exchange in Populus euphratica across soil water and salinity gradients[J]. Photosynthetica, 2013, 51(3): 321−329. doi: 10.1007/s11099-013-0028-z
[5] Pan Y P, Chen Y P, Chen Y N, et al. Impact of groundwater depth on leaf hydraulic properties and drought vulnerability of Populus euphratica in the northwest of China[J]. Trees, 2016, 30(6): 2029−2039. doi: 10.1007/s00468-016-1430-5
[6] 韩玉玲, 徐刚, 高文瑞, 等. 保水剂对水分胁迫下辣椒生长及光合作用的影响[J]. 西北植物学报, 2012, 32(6): 1191−1197. doi: 10.3969/j.issn.1000-4025.2012.06.019 Han Y L, Xu G, Gao W R, et al. Effects of super absorbent polymers (SAP) on growth and photosynthesis of pepper plants under water stress[J]. Acta Botanica Boreali-Occidentalia Sinica, 2012, 32(6): 1191−1197. doi: 10.3969/j.issn.1000-4025.2012.06.019
[7] 韦兰英, 袁维圆, 焦继飞, 等. 紫花苜蓿和菊苣比叶面积和光合特性对不同用量保水剂的响应[J]. 生态学报, 2009, 29(12): 6772−6778. doi: 10.3321/j.issn:1000-0933.2009.12.055 Wei L Y, Yuan W Y, Jiao J F, et al. The response of SLA and photosynthesis of Medicago sativa and Cichorium intybus to different rates of super absorbent polymer[J]. Acta Ecologica Sinica, 2009, 29(12): 6772−6778. doi: 10.3321/j.issn:1000-0933.2009.12.055
[8] 白岗栓, 耿伟, 何登峰. 保水剂施用量对秦巴山区土壤特性及烤烟生长的影响[J]. 浙江大学学报(农业与生命科学版), 2019, 45(3): 343−354. Bai G Q, Geng W, He D F. Effects of super absorbent polymer with different application rates on soil characteristics and flue-cured tobacco growth in Qinba Mountain area[J]. Journal of Zhejiang University (Agriculture & Life Sciences), 2019, 45(3): 343−354.
[9] 张鸿雁, 王百田, 邹丽玲. 半干旱黄土区保水剂使用浓度的研究[J]. 北京林业大学学报, 2003, 25(2): 14−17. doi: 10.3321/j.issn:1000-1522.2003.02.003 Zhang H Y, Wang B T, Zou L L. Improvement on technological model of water-retaining in semiarid loess plateau area[J]. Journal of Beijing Forestry University, 2003, 25(2): 14−17. doi: 10.3321/j.issn:1000-1522.2003.02.003
[10] 张宇君, 尚以顺, 王普昶, 等. 干旱胁迫下保水剂对盘江白刺花幼苗生长和生理特性的影响[J]. 草业学报, 2020, 29(7): 90−98. doi: 10.11686/cyxb2019510 Zhang Y J, Shang Y S, Wang P C, et al. Effects of super absorbent polymers on growth and physiological characteristics of Sophora davidi vs. Panjiang seedlings under drought stress[J]. Acta Prataculturae Sinica, 2020, 29(7): 90−98. doi: 10.11686/cyxb2019510
[11] 李晶晶, 白岗栓. 保水剂在水土保持中的应用及研究进展[J]. 中国水土保持科学, 2015, 10(1): 114−120. Li J J, Bai G S. Application and development of water holding agents in soil and water conservation[J]. Science of Soil and Water Conservation, 2015, 10(1): 114−120.
[12] 杨义伶, 高洁, 徐回林, 等. 保水剂对南丰蜜橘叶绿素含量与光合速率的影响[J]. 江西农业学报, 2010, 22(2): 46−48. doi: 10.3969/j.issn.1001-8581.2010.02.015 Yang Y L, Gao J, Xu H L, et al. Effects of water-holding agent on chlorophyll content and photosynthetic rate of Nanfeng orange[J]. Acta Agriculture Jiangxi, 2010, 22(2): 46−48. doi: 10.3969/j.issn.1001-8581.2010.02.015
[13] 黄毅, 李衍素, 贺超兴, 等. 根施聚天门冬氨酸对日光温室黄瓜生长、产量及矿质元素吸收的影响[J]. 中国蔬菜, 2018(1): 44−49. Huang Y, Li Y S, He C X, et al. Effect of polyaspartic acid root application on growth, yield and mineral elements absorption of Cucumber grown in solar greenhouse[J]. China Vegetables, 2018(1): 44−49.
[14] 琚茜茜, 梁家作, 秦健, 等. 聚天冬氨酸溶液灌根对芥蓝生长发育及品质的影响[J]. 北方园艺, 2019(23): 1−5. Ju X X, Liang J Z, Qin J, et al. Effect of root irrigation of polyaspartic acid on plant growth and quality of Chinese kale[J]. Northern Horticulture, 2019(23): 1−5.
[15] 王娜, 徐嘉翼, 张鑫, 等. 聚天门冬氨酸尿素对水稻产量及田面水氮素变化的综合影响[J]. 农业资源与环境学报, 2021, 38(1): 96−103. Wang N, Xu J Y, Zhang X, et al. Effects of polyaspartic acid urea on rice yield and nitrogen concentrations in paddy field ponding water[J]. Journal of Agricultural Resources and Environment, 2021, 38(1): 96−103.
[16] 赵俭波, 罗楠, 曹辉. PASP/PAA互穿网络水凝胶的制备及其作为保水剂的应用[J]. 精细化工, 2020, 37(8): 1601−1607,1635. Zhao J B, Luo N, Cao H. Preparation of PASP/PAA interpenetrate network hydrogel and its application in water retaining agent[J]. Fine Chemicals, 2020, 37(8): 1601−1607,1635.
[17] 武毅, 孙保平, 张建锋, 等. 保水剂对4种木本植物生长及根系形态的影响[J]. 中国水土保持科学, 2018, 16(1): 96−102. Wu Y, Sun B P, Zhang J F, et al. Effects of water-retaining agent in different dosage on the growth and root morphology of 4 woody plants[J]. Science of Soil and Water Conservation, 2018, 16(1): 96−102.
[18] 韩志伟. 西宁地区旱地造林节水措施对土壤含水量及苗木生长的影响[D]. 西宁: 青海大学, 2020. Han Z W. Effects of afforestation and water-saving measures on soil moisture content and seedling growth in Xining Area [D]. Xining: Qinghai University, 2020.
[19] 张彩琴, 杨持. 内蒙古典型草原几种不同植物的生长动态比较[J]. 生态学杂志, 2007, 26(11): 1712−1718. Zhang C Q, Yang C. Growth dynamics of several plant species on typical steppe of Inner Mongolia[J]. Chinese Journal of Ecology, 2007, 26(11): 1712−1718.
[20] Cornelissen J H C, Lavorel S, Garnier E, et al. A handbook of protocols for standardised and easy measurement of plant functional traits worldwide[J]. Australian Journal of Botany, 2003, 51(4): 335−380. doi: 10.1071/BT02124
[21] Ye Z P, Yu Q, Kang H J. Evaluation of photosynthetic electron flow using simultaneous measurements of gas exchange and chlorophyll fluorescence under photo respiratory conditions[J]. Photosynthetica, 2012, 50(3): 472−476. doi: 10.1007/s11099-012-0051-5
[22] 高俊凤. 植物生理学实验指导[M]. 北京: 高等教育出版社, 2006. Gao J F. Plant physiology experiment guidance [M]. Beijing: Higher Education Press, 2006.
[23] 曲弨琪, 满秀玲, 段亮亮. 生物制剂对约书亚树幼苗成活及生理生化影响的综合评价[J]. 北京林业大学学报, 2012, 34(4): 67−72. Qu C Q, Man X L, Duan L L. Comprehensive evaluation on the effects of different biological agents on survival rate, growth, physiological and biochemical indexes of desert plant Yucca brevifolia seedlings[J]. Journal of Beijing Forestry University, 2012, 34(4): 67−72.
[24] 张丽华, 边少锋, 孙宁, 等. 保水剂不同粒型及施用量对玉米产量和光合性状的影响[J]. 玉米科学, 2017, 25(1): 153−156. Zhang L H, Bian S F, Sun N, et al. Effects of different grain size and amount of water retaining agent on yield and photosynthetic characteristics of maize[J]. Journal of Maize Sciences, 2017, 25(1): 153−156.
[25] 吴敏, 张文辉, 周建云, 等. 干旱胁迫对栓皮栎幼苗细根的生长与生理生化指标的影响[J]. 生态学报, 2014, 34(15): 4223−4233. Wu M, Zhang W H, Zhou J Y, et al. Effects of drought stress on growth, physiological and biochemical parameters in fine roots of Quercus variabilis Bl. seedlings[J]. Acta Ecologica Sinica, 2014, 34(15): 4223−4233.
[26] 黄海霞, 杨琦琦, 崔鹏, 等. 裸果木幼苗根系形态和生理特征对水分胁迫的响应[J]. 草业学报, 2021, 30(1): 197−207. doi: 10.11686/cyxb2020057 Huang H X, Yang Q Q, Cui P, et al. Changes in morphological and physiological characteristics of Gymnocarpos przewalskii roots in response to water stress[J]. Acta Prataculturae Sinica, 2021, 30(1): 197−207. doi: 10.11686/cyxb2020057















计量
- 文章访问数: 982
- HTML全文浏览量: 301
- PDF下载量: 88
