
Optimization design and obstacle-crossing performance analysis of forest parallel articulated chassis
-
摘要:目的林业动力底盘一般在地形复杂多变的环境进行露天作业,故其需要具有良好的地面适应性以及较大且稳定的车轮与地面接触力。我国林区特种车辆底盘研究相对薄弱,而国外林业特种车辆底盘在我国实际运用中具有一定的局限性,因此,研发针对我国山地环境的特种车辆底盘对我国林业发展有重要意义。方法根据多自由度并联平台的运动原理和优点,设计一种具有俯仰、转向、侧翻3种相对运动的新型林用铰接机构,并结合Creo Parametric和Adams/View进行参数化建模和运动学优化设计。为了评估该铰接机构的越障性能,对普通底盘和并联式铰接底盘进行爬越斜坡和陡凸越障联合仿真,通过底盘质心高度变化曲线以及车轮与地面的接触力曲线分析并联式铰接底盘的越障性能,并与普通底盘进行对比。结果优化设计后的并联式铰接机构转向角和俯仰角最大值增加,并且并联式铰接底盘越障时的车轮与地面的接触力、最大爬坡角度和陡凸越障高度均比普通底盘大。结论并联式铰接底盘总体越障性能优于普通刚性连接底盘,该并联式铰接机构适用于林业动力底盘。Abstract:ObjectiveThe forestry power chassis generally makes open-air operation in the complex and changeable terrain, therefore it needs to have good adaptability and large and stable wheel contact force with the ground. In China, the research on special vehicle chassis in forest area is relatively weak, and the foreign forestry special vehicle chassis has certain limitations in practical application.MethodIn this paper, we designed a new type of forest hinged mechanism, which is able to pitch, steer and side flip based on the movement principle and advantages of the multi-DOF parallel platform, and incorporate Creo Parametric and Adams/View for modeling and kinematic optimal design to assess the obstacle-navigation performance of the articulated mechanism, make co-simulation of common and parallel hinged chassis climbing slope and crossing obstacle at different obstruction levels. Through the curve of the height of the chassis centroid and the contact force curve of the wheel and the ground, we can analyze the obstacle-crossing performance of parallel articulated chassis and comparing it with common chassis.ResultThe maximum steering and pitch angle of the parallel hinged mechanism increased after the optimized design. When the parallel hinged chassis crossed obstacle, its surface adhesion and maximum climbing angle and obstacle height were larger and it can ensure good obstacle-crossing ability within a certain scope of height.ConclusionThe parallel hinged chassis obstacle-navigation performance is better than that of ordinary rigid connection chassis, and the parallel hinged mechanism is suitable for forestry power chassis.
-
防浪林是种植于堤防迎水侧滩地上用于防浪护堤和抢险取材的专用林,既可以保持水土、调节气候、促进林业经济发展,又可以防浪消能、延长堤防寿命和减少堤防的维护费用,是堤防工程的重要组成部分[1-2]。目前我国各大江河堤岸的重要河段均种植了防浪林,且根据不同河段的实际情况,实施了不同的防浪林建设方案。物理模型实验是研究防浪林消浪机理的一个有效手段,对科学提出防浪林优化布局以及如何营造防浪林工程有重要理论指导意义和实用价值。目前已有很多学者进行了相关的物理实验研究。何飞等[3]在考虑植物根、茎、叶影响下设计水槽实验探究刚性植物的消浪特性,认为根、茎、叶均在不同程度上影响植物消浪特性。陈杰等[4]在研究刚性植物根、茎、叶对植物消波特性的影响中得出植物消波特性与植物淹没度有关,根、茎、叶的存在增加了植物拖曳力系数。陈杰等[5]还通过物理实验研究了规则波通过非淹没刚性植物波高的沿程变化,实验结果表明相比于矩形分布方式,三角形的分布方式消耗了更多的波能,消浪效果更明显。
以上相关的物理实验研究主要是针对植被本身的特性以及排列方式对消浪效果的影响,缺乏对林带宽度、植被密度、滩地波高等因素的考虑,以及不规则波条件下植被对消浪效果的影响。
本文以嫩江干流佰大街堤防为例,选取防浪林林带宽度、排列方式、密度、树型以及滩地波高作为影响因素,采用控制变量法,通过构建防浪林消浪物理模型研究其对消浪效果的影响,并提出合理的防浪林优化设计方案。
1. 研究区概况
嫩江干流佰大街堤防位于黑龙江省齐齐哈尔市泰来县境内,自汤池镇愚公堤经佰大街村至李地房子,堤防分为上、中、下3段,全长6.70 km。原佰大街堤上下段中间为高地相连,后因村民在高地附近修建民房,不断从高地取土,导致现有高地地面高程减少,最低处地面高程141.5 m,远低于此处河道50年一遇洪水位144 m,造成了防洪缺口。现状堤防属于扩建砂堤,筑堤土料比较松散,抗冲刷能力较弱,容易产生流土、管涌等现象。嫩江该河段高水位时,水面宽阔,堤前滩地现有防浪林1.0 km,多为5 ~ 8年生的杨树(Populus spp.)和少量柳树(Salix spp.)。预计规划新建防浪林10 km。该段堤防防洪标准目前仅为30 ~ 35年一遇。佰大街堤防如图1所示。
2. 物理模型设计
2.1 模型比尺确定
模型比尺的确定主要依据实验条件、波浪要素、造波机性能等因素,并综合考虑比尺效应带来的误差影响等。已有的物理模型实验研究中,王瑞雪[6]选择几何比尺1∶20,在长40 m× 宽0.5 m × 高0.8 m 的水槽中进行非刚性植物对波浪传播变形影响的实验研究;吉红香[7]选择几何比尺为1∶10,在长66 m × 宽1.0 m × 高1.6 m的水槽中研究滩地植物对波浪变形及消浪效果的影响。
本实验是在不规则波浪水槽中进行。为了消除比尺效应,更好的模拟嫩江干流防浪林的消浪效果,依据实际条件下防浪林的植被生长能力、波浪要素以及现有实验设备条件,结合实验方案的设计,对比造波机实际可造波周期,依照周期比例确定模型几何比尺,并根据重力相似准则确定时间比尺,最终确定本模型采用的比尺为1∶10。其中比尺确定公式[8]如(1)所示。
λ=lmlp,λt=λ−1/2,λf=λ1/2λu=λ−1/2,λF=λ−3,λQ=λ−5/2 (1) 式中:
λ 为模型长度比尺;lp 为原型长度;lm 为模型长度;λt 为时间比尺;λf 为频率比尺;λu 为速度比尺;λF 为力比尺;λQ 为流量比尺。2.2 实验方案与依据
关于植被消浪的物理模型实验设计方面,白玉川等[9]用裁减的桧柏(Sabina chinensis)枝模拟防浪林,研究了非破碎波条件下的防浪林消浪效果。胡嵋等[10]对于在堤岸上栽种植被消浪这一新的护岸工程,选取桧柏树枝作为防浪林的模型,择选出对消浪护岸具有主要影响的因素。王瑞雪[6]用PVC塑料圆管来模拟刚性植物树干进行波浪水槽物理模型实验。吴迪等[11]和曹海锦等[12]也分别利用聚乙烯仿真绿色植物模拟柔性植物进行柔性植物消浪及沿程阻流特性实验研究。通过不同的研究可以发现影响消浪效果的主要因素为防浪林林带宽度、排列方式、种植密度、林木高度等。
针对不同的实际条件,物理模型的设计方案有一定的差异,需根据实际情况和需要来设计实验方案。本实验根据嫩江干流的实际条件及水文资料,推算佰大街堤防典型断面的多年一遇水位高程及波要素极值,对比分析不同条件下波浪沿程衰减的变化。由于防浪林消浪效果的影响因素较多,因而本模型实验采用控制单因素变量法,得出各因素对消浪效果的影响。本实验中设计的主要对比方案有:不同的防浪林林带宽度、不同的防浪林排列方式、不同的防浪林密度、不同树型的防浪林、以及不同的来波波高等的消浪实验方案。分析不同实验方案条件下的消浪效果,提出该段的防浪林优化布局方案。
根据研究区实际防浪林植被的外形参数,包括树高、树干直径、树冠直径、树冠以下树干高度等,按照比尺计算模型树的外形参数,根据所需材料的尺寸对模型树进行修剪和黏合,植物树干采用圆形木棒模拟,植物树冠部分采用塑料仿真枝叶模拟,由此制作合适的模型树,如图2所示。
同时,为更好的定量分析防浪林消浪机理,定义
q 为防浪林植被消浪系数:q=(h−h′)/h (2) 式中:
h 为无防浪林的波高,h′ 为经过防浪林消波后的波高。2.3 实验断面和波要素的选取
佰大街断面50年一遇洪水条件下滩地平均水深为2.83 m,此时防浪林处于部分淹没状态。依据该断面多年一遇水位及波浪要素值的推算结果中50年一遇的波要素,得出该堤段波浪周期在2 ~ 4 s之间,平均波高在0.1 ~ 0.6 m之间。根据《海港水文规范》推算出相应的1/10大波(规则波)波高,Hs(不规则波)有效波高,分别进行了规则波和不规则波消浪效果的模拟实验,实验波要素分别为1/10波高1.16 m、有效波高0.91 m、平均波高0.57 m、平均周期3.01 m。此外,为进一步研究不同波要素条件下防浪林消浪效果的差异,选取了1.1倍和0.9倍50年一遇波高条件进行对比实验。
2.4 实验设备及布置
本实验是在河海大学海岸工程实验大厅70 m长的不规则波浪水槽中进行,水槽宽1.0 m,高1.8 m,有效实验段宽1 m。水槽一端安装了推板式不规则生波机,通过电机系统控制推波板运动行程和频率[13]。数字波高仪采用YWS200-XX型,波高采集系统采用水工试验数据采集处理系统(DJ800型),精度为0.01 cm。所有量测信号均通过计算机采集、记录和分析,能模拟最大波高0.3 m、波周期0.5 ~ 5 s的不规则波,具备研究不规则波作用下的各种动力响应机制及波浪与建筑物相互作用关键技术和理论问题的能力。水槽底部铺设灰色混凝板,在灰塑料板上打孔用以固定植物模型。水槽左侧为造波机,波高传感器两个,分别布设在防浪林模型前后,采集波高的变化。最右侧为消波层,能够有效地吸收尾波的波能,避免波浪的反射对实验造成干扰(实验布置和实验实景图分别如图3和图4所示)。
3. 防浪林消浪机理物理实验结果分析
3.1 不同防浪林林带宽度和防浪林排列方式的消浪结果
根据实验方案,进行了佰大街断面在不同排列方式(等边三角形、正方形及梅花形,如图5 ~ 7所示)条件下的消浪实验。由于模型比尺为1∶10,因此根据佰大街的种植现状,确定实验室条件下的防浪林植被密度为17株/m2,树干直径为0.7 cm,树干高度为16 cm,树冠直径为13 cm,树冠为高度8 cm。规则波和不规则波条件下的实验结果分别如图8和图9所示。
![]() 图 8 不同排列方式规则波沿程消浪系数Figure 8. Regular wave dissipation coefficient along the path of different arrangements
图 8 不同排列方式规则波沿程消浪系数Figure 8. Regular wave dissipation coefficient along the path of different arrangements![]() 图 9 不同排列方式不规则波沿程消浪系数Figure 9. Irregular wave dissipation coefficient along the path of different arrangements
图 9 不同排列方式不规则波沿程消浪系数Figure 9. Irregular wave dissipation coefficient along the path of different arrangements对比不同的防浪林排列方式下防浪林的消浪效果,可见在规则波条件下,当林带宽度在40 m以上时,等边三角形和梅花形排列的防浪林要明显优于正方形排列;在不规则波条件下,当林带宽度在40 m以上时,等边三角形和正方形排列的防浪林要明显优于梅花形排列。因此,等边三角形排列方式相对较优。这与陈杰等[5]通过物理实验研究规则波通过非淹没刚性植物波高的沿程变化中得出三角形分布方式消浪效果最明显的结论一致。对比相同防浪林林带宽度下的规则波和不规则的消浪效果,可以发现规则波条件下防浪林的消浪系数较大,但两者差距较小。而实际条件下的波浪为不规则波,因而不规则波的消浪系数更为接近实际条件。
同时,还可以发现,不管是规则波还是不规则波条件下,随着林带宽度增加到30 m以后,防浪林的消浪系数对于林带宽度的敏感度降低,此时消浪效果提升空间很小。
3.2 不同密度的防浪林消浪效果
根据实验方案,进行了在不同密度的防浪林(实验室条件下8株/m2,17株/m2,27株/m2)条件下的消浪实验。其中实验室条件下树型为,树干直径0.7 cm,树干高度16 cm,树冠直径13 cm,树冠高度8 m。采用不规则波,实验结果如图10所示。
![]() 图 10 不同密度不规则波沿程消浪系数Figure 10. Irregular wave dissipation coefficient along the path of different densities
图 10 不同密度不规则波沿程消浪系数Figure 10. Irregular wave dissipation coefficient along the path of different densities对比不同密度的防浪林的消浪效果,可以发现,当防浪林林带宽度为10 m时,不同密度的防浪林消浪效果差别不大,均为8%左右;当防浪林林带宽度大于10 m时,防浪林的消浪效果随着密度的增加而增加,密度27株/m2比密度8株/m2的消浪系数大5%到10%。但过高的密度会影响防浪林树木的正常生长,而且种植成本较高。可见,当林带宽度为40 m,排列方式为等边三角形时,0.17株/m2(原型条件)是较为经济合理的植被密度方案。此时,当防浪林林带宽度进一步增大50 m时,防浪林的消浪系数仅增加3.04%。
3.3 不同树型的防浪林消浪效果
根据实地测量,选取了4种树型作为树干和树冠条件的组合,如表1所示,采用相对较优的等边三角形排列方式,实验室条件下防浪林密度为17株/m2。规则波和不规则波条件下的模型实验结果分别如图11和图12所示。
表 1 树型尺寸Table 1. Tree size项目
Item树型1
Tree type 1树型2
Tree type 2树型3
Tree type 3树型4
Tree type 4树干高度
Trunk height/m0.26 0.26 0.26 0.16 树干半径
Trunk radius/m0.025 0.015 0.015 0.007 树冠高度
Crown height/m0.35 0.35 0.35 0.08 树冠直径
Crown radius/m0.25 0.25 0.17 0.13 ![]() 图 11 不同树型规则波沿程消浪系数Figure 11. Regular wave dissipation coefficient along the path of different tree types
图 11 不同树型规则波沿程消浪系数Figure 11. Regular wave dissipation coefficient along the path of different tree types![]() 图 12 不同树型不规则波沿程消浪系数Figure 12. Irregularwave dissipation coefficient along the path of different tree types
图 12 不同树型不规则波沿程消浪系数Figure 12. Irregularwave dissipation coefficient along the path of different tree types由以上结果可见,不同树型的消浪效果有着明显的差异。树型1(成年树)树干较粗,树冠较为茂密,茂密的根、茎、叶存在增加了植物拖曳力系数,因而消浪能力显著,规则波条件下,20 m宽的防浪林其消浪系数即达60%左右,50 m宽防浪林的消浪系数可达到80%以上。
树型2相对树型1的差别为树干半径较小,由消浪实验结果可见,树干的粗细对消浪效果的影响较小。树型3的消浪系数要小于树型2。而树型4(幼树)的消浪效果明显小于树型1、树型2和树型3。可见,不同防浪林树型对同一断面条件下的消浪效果有着重要的影响,对比其消浪系数可知,树冠的消浪作用要明显强于树干,因而在防浪林方案设计时,需考虑采用树冠消浪为主的方法。
3.4 不同来波波高影响下消浪效果
根据实验方案,进行了在不同来波波高(1.1倍50年一遇波高、50年一遇波高、0.9倍50年一遇波高)条件下的消浪实验。采用相对较优的等边三角形排列方式,实验室条件下,树干直径0.7 cm,树干高度16 cm,树冠直径13 cm,树冠高度8 cm。规则波和不规则波条件下的模型实验结果分别如图13和图14所示。
![]() 图 13 不同波高规则波沿程消浪系数Figure 13. Regular wave dissipation coefficient along the path of different wave heights
图 13 不同波高规则波沿程消浪系数Figure 13. Regular wave dissipation coefficient along the path of different wave heights![]() 图 14 不同波高不规则波沿程消浪系数Figure 14. Irregular wave dissipation coefficient along the path of different wave heights
图 14 不同波高不规则波沿程消浪系数Figure 14. Irregular wave dissipation coefficient along the path of different wave heights由图13和图14可见,不同波高条件下的消浪效果有所差异,但差异较小,且不规则波的消浪系数变化更为稳定。波高越大,消浪效果越好。
4. 结 论
嫩江干流佰大街堤防段,在合理的防浪林树型条件下,等边三角形排列的防浪林要优于梅花形和正方形排列方式;密度的增加对防浪林消浪效果有着一定的提高,但过高的密度会影响防浪林树木的正常生长;不同树型对不同断面条件的消浪效果有着重要的影响,且树冠的消浪作用要明显强于树干。不同波高条件下的消浪效果有所差异,但差异较小,且不规则波的消浪系数变化更为稳定。
-
![]()
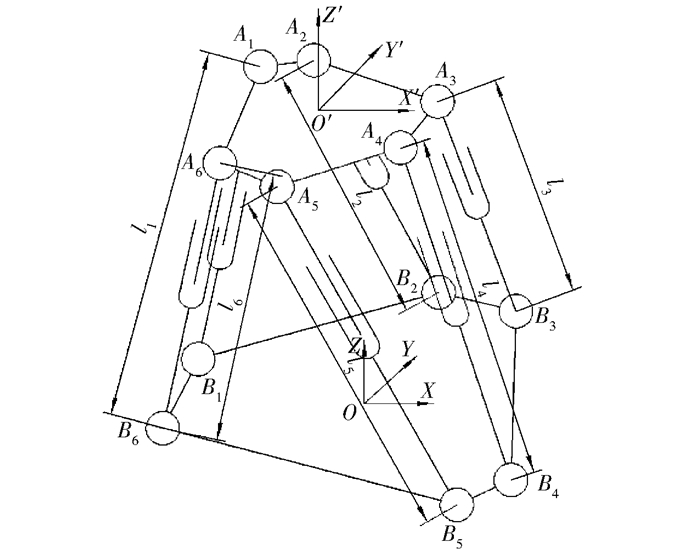
图 1 并联式多自由度铰接机构运动简图
Ai(i=1, 2, …, 6)为后车联接圆筒与液压缸的铰点;Bi(i=1, 2, …, 6)为前车联接圆筒与液压缸的铰点;O、X、Y、Z为后车联接圆筒上的原点和X、Y、Z轴;O′、X′、Y′、Z′为前车联接圆筒上的原点和X′、Y′、Z′轴;li(i=1, 2, …, 6)分别为6个液压缸长度。
Figure 1. Kinematic diagram of a parallel multiple of articulation mechanism
Ai(i=1, 2, …, 6) are the reaming points of the rear coupling cylinder and the hydraulic cylinder; Bi(i=1, 2, …, 6) are the reaming points of the front coupling cylinder and the hydraulic cylinder; O, X, Y and Z are the origin on the rear car connection cylinder and the X, Y and Z axes; O′, X′, Y′ and Z′ are the origin of the front car connection cylinder and the X′, Y′ and Z′ axis. li(i=1, 2, …, 6) are the lengths of six hydraulic cylinders.
![]()
图 3 并联铰接机构坐标系示意图
ϕ1、ϕ2分别为转动副在前后圆筒上相隔的角度。
Figure 3. Schematics of parallel articulated system
ϕ1 and ϕ2 are the angles between revolve pairs separated on the front and rear cylinders.
![]()
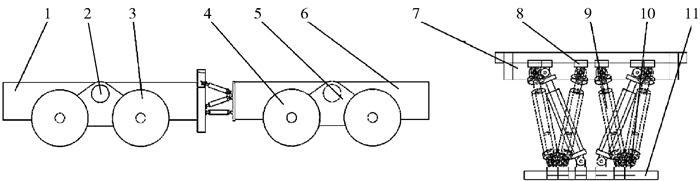
图 4 并联式铰接底盘示意图
1.前车底盘; 2.前车三角摆臂; 3.前车车轮; 4.后车车轮; 5.后车三角摆臂; 6.后车底盘; 7.前车联接圆筒; 8.前液压缸安装座; 9.转动移动液压缸; 10.后液压缸安装座; 11.后车联接圆筒。
Figure 4. Parallel articulated chassis diagram
1, front chassis; 2, front triangular swing arm; 3, front wheel; 4, rear wheel; 5, rear triangular swing arm; 6, rear frame; 7, front coupling cylinder; 8, front cylinder seat; 9, rotating moving hydraulic cylinder; 10, rear cylinder seat; 11, rear coupling cylinder.
![]()
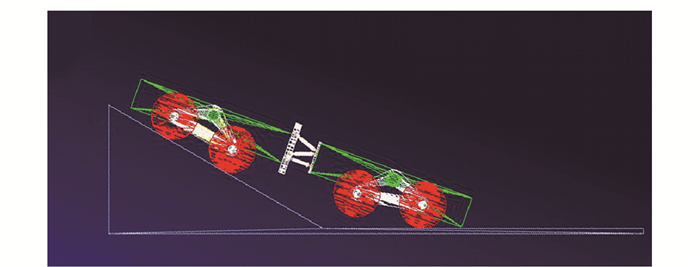
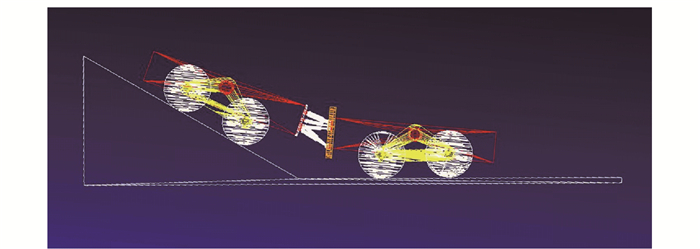
图 6 并联式铰接底盘爬越斜坡仿真模型
Figure 6. Parallel articulated chassis climbing ramp simulation model
![]()
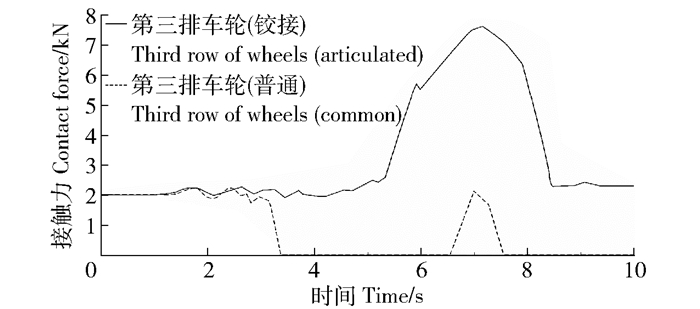
图 9 底盘车轮与地面接触力对比曲线
Figure 9. Comparison curves of contact force between chassis wheel and ground
![]()
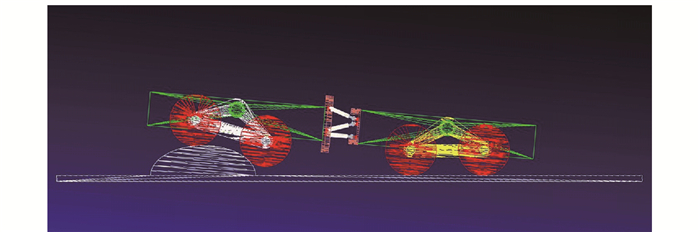
图 10 并联式铰接底盘陡凸越障仿真模型
Figure 10. Steeper obstacle-crossing simulation model of parallel articulated chassis
![]()
图 11 不同障碍物高度下并联式铰接底盘质心高度曲线
Figure 11. Height curves of hinged chassis centroid at different obstacle heights
![]()
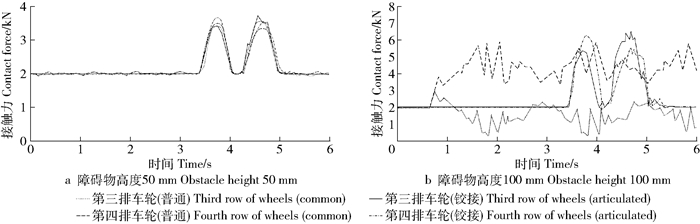
图 12 不同障碍物高度下并联式铰接底盘车轮与地面接触力曲线
Figure 12. Contact force curves of articulated chassis wheels and ground at different obstacle heights
![]()
图 13 普通底盘陡凸越障仿真模型
Figure 13. Steeper obstacle-crossing simulation model of common chassis
![]()
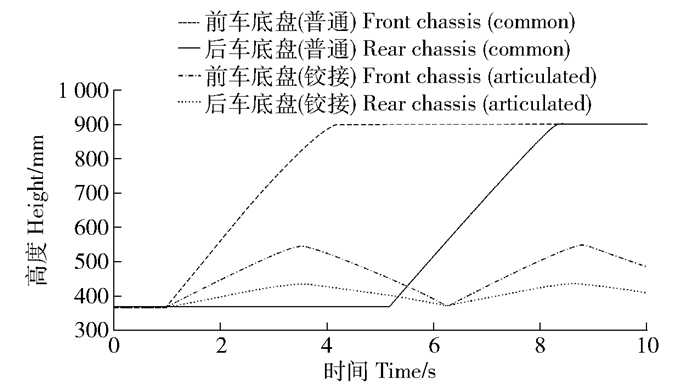
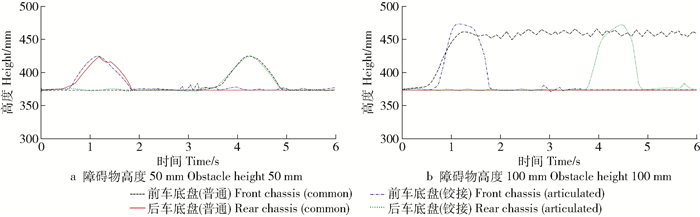
图 14 不同障碍物高度下普通底盘与并联式铰接底盘质心高度对比曲线
Figure 14. Height of centroid comparison curves at different obstacle heights
![]()
图 15 不同障碍物高度下普通底盘和并联式铰接底盘车轮与地面接触力对比曲线
Figure 15. Comparison curves of contact forces between wheels and ground at different obstacle heights
表 1 设计变量初始值敏感值
Table 1 Initial value sensitivity of design variables
设计变量
Design variable参数化点
Parametric point初始值
Initial value初始值处敏感值Sensitive value at the initial value 转向角
Steering angle俯仰角
Pitching angleV1 B1Z -19.1 5.7×10-8 4.9×10-8 V2 B6Z -103.4 -0.02 -0.02 V3 B5Z -84.3 0 0 V7 A1Z -58.7 0.03 0.02 V8 A6Z -74.4 -4.5×10-14 -1.6×10-13 V9 A5Z -19.9 0 0 V13 B1X 108.3 9.3×10-8 7.9×10-8 V14 B6X -37.6 -0.04 -0.03 V15 B5X -70.7 0 0 V16 A1X 44.6 -0.02 -0.02 V17 A5X 9.9 0.1 0.1 V18 A6X -79.4 0 0 注: AiX、AiZ、BiX、BiZ(i=1, 5, 6)为各关键点的X、Z轴坐标;Vn(n=1, 2, 3, 7, 8, 9, 13, 14, 15, 16, 17, 18)为对应各坐标的设计变量。Notes: AiX, AiZ, BiX, BiZ(i=1, 5, 6) are the X and Z coordinates of each point; Vn(n=1, 2, 3, 7, 8, 9, 13, 14, 15, 16, 17, 18)are the design variables for the respective coordinates.  下载: 导出CSV
下载: 导出CSV
表 2 优化前后关键点坐标
Table 2 Coordinates of key points before and after optimization
关键点坐标Coordinates of key points B1X B1Z B6X B6Z A1X A1Z A6X A6Z 优化前Before optimization 108.3 -19.1 -37.6 -103.4 44.6 -58.7 9.9 -74.4 优化后After optimization 103.0 -24.1 -35.7 -108.4 42.4 -55.8 9.4 -78.1
下载: 导出CSV
表 3 底盘相关参数及仿真参数
Table 3 Chassis related parameters and simulation parameters
参数Parameter 数值Value 车架长度Frame length/m 1.2 车架宽度Frame width/m 0.8 摆臂纵向距离Swing arm longitude distance/mm 1 445 摆臂横向距离Swing arm transverse distance/mm 870 整车质量Whole vehicle mass/kg 1 600 液压缸活塞直径Cylinder piston diameter/mm 25 液压缸活塞杆直径Cylinder rod diameter/mm 18 液压缸的总行程Total stroke of cylinder/mm 120 路面横向摩擦系数Transverse friction coefficient 0.7 路面滚动摩擦系数Rolling friction coefficient 0.06 摆臂最大转角Swing arm maximum angle/(°) ±10 液压缸长度范围Hydraulic cylinder length range/mm 166.3~226.3 液压缸与安装座最大相对转角Maximum relative turning angle between hydraulic cylinder and seat/(°) ±20
下载: 导出CSV
-
[1] 周良, 李力, 李小飞.海底采矿车多自由度铰接机构设计与优化[J].现代制造工程, 2009(9): 120-123, 111. doi: 10.3969/j.issn.1671-3133.2009.09.033 Zhou L, Li L, Li X F. Design and optimization of a multi-degree of freedom articulated mechanism[J]. Modern Manufacturing Engineering, 2009(9): 120-123, 111. doi: 10.3969/j.issn.1671-3133.2009.09.033
[2] 孙治博.六轮摆臂林用底盘稳定性分析与防倾翻研究[D].北京: 北京林业大学, 2016: 113-117. http://cdmd.cnki.com.cn/Article/CDMD-10022-1016139954.htm Sun Z B. Stability analysis and anti-rollover research for a six wheel-legged forestry machinery chassis[D]. Beijing: Beijing Forestry University, 2016: 113-117. http://cdmd.cnki.com.cn/Article/CDMD-10022-1016139954.htm
[3] Potau X, Comellas M, Nogués M, et al. Comparison of different bogie configurations for a vehicle operating in rough terrain[J]. Journal of Terramechanics, 2011, 48(1): 75-84. doi: 10.1016/j.jterra.2010.06.002
[4] 李力, 赵辉, 李炳华.铰接履带式海底采矿车越障性能仿真研究[J].计算机仿真, 2008, 25(12): 195-199. doi: 10.3969/j.issn.1006-9348.2008.12.051 Li L, Zhao H, Li B H. Simulation of motion characteristic of miner with articulated tracked vehicle on seamount[J]. Computer Simulation, 2008, 25(12): 195-199. doi: 10.3969/j.issn.1006-9348.2008.12.051
[5] 蒋冬政.六自由度并联机器人运动学正/反解研究[D].兰州: 兰州理工大学, 2016: 67-74. http://cdmd.cnki.com.cn/Article/CDMD-10731-1016906324.htm Jiang D Z. Research on the forward/inverse kinematics of parallel robot with six degrees of freedom[D]. Lanzhou: Lanzhou University of Technology, 2016: 67-74. http://cdmd.cnki.com.cn/Article/CDMD-10731-1016906324.htm
[6] Li Y M, Xu Q S. Dynamic modeling and robust control of a 3-PRC translational parallel kinematic machine[J]. Robotics and Computer-Integrated Manufacturing, 2009, 25(3): 630-640. doi: 10.1016/j.rcim.2008.05.006
[7] 侯绪研.六轮摇臂式月球车运动协调控制模式研究[D].哈尔滨: 哈尔滨工业大学, 2009: 134-142. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D257923 Hou X Y. Research on coordinated motion control mode for six-wheeled rocker lunare rover[D]. Harbin: Harbin Institute of Technology, 2009: 134-142. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D257923
[8] 姚莉君.三自由度平动并联机构的动力学与控制系统研究[D].南京: 南京航空航天大学, 2012: 81-90. http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041913.htm Yao L J. Research on dynamics and control system of the 3-dof translational parallel mechanism[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 81-90. http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041913.htm
[9] 陈娟, 赵君伟, 付永领, 等.基于多软件协同仿真的六自由度平台虚拟试验系统[J].机床与液压, 2017, 45(17): 20-23. doi: 10.3969/j.issn.1001-3881.2017.17.005 Chen J, Zhao J W, Fu Y L, et al. Virtual test system based on multi co-simulation software of six degrees of freedom platform[J]. Machine Tools & Hydraulics, 2017, 45(17): 20-23. doi: 10.3969/j.issn.1001-3881.2017.17.005
[10] Wang H B, Sang L F, Hu X, et al. Kinematics and dynamics analysis of a quadruped walking robot with parallel leg mechanism[J]. Chinese Journal of Mechanical Engineering, 2013, 26(5): 881-891. doi: 10.3901/CJME.2013.05.881
[11] 曹毅, 黄真, 周辉. 6/6-Stewart机构姿态奇异及姿态工作空间分析[J].设备设计与维修, 2005, 6: 90-92. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgys200506039 Cao Y, Huang Z, Zhou H. Orientation-singularity and orientation-workspace analysis of the 6/6-Stewart manipulator[J]. Equipment Design and Maintenance, 2005, 6: 90-92. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgys200506039
[12] 马建明.飞行模拟器液压Stewart平台奇异位形分析及其解决方法研究[D].哈尔滨: 哈尔滨工业大学, 2010: 144-152. http://cdmd.cnki.com.cn/article/cdmd-10213-2011016010.htm Ma J M. Analysis of singular configuration and research of its solving method of the hydraulic stewart platform of flight simulator[D]. Harbin: Harbin Institute of Technology, 2010: 144-152. http://cdmd.cnki.com.cn/article/cdmd-10213-2011016010.htm
[13] Li Y M, Xu Q S. Dynamic modeling and robust control of a 3-PRC translational parallel kinematic machine[J]. Robotics and Computer-Integrated Manufacturing, 2009, 25(3): 630-640. doi: 10.1016/j.rcim.2008.05.006
[14] Gao Q M, Gao F, Tian L. Design and development of a variable ground clearance, variable wheel track self-leveling hillside vehicle power chassis (V2-HVPC)[J]. Journal of Terramechanics, 2014, 56:78-90. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=091a1ac3be9dfa5b5c7161cc31d004df
[15] 许宏光, 谭健.基于ADAMS和Matlab/Simulink的6-UCU型Stewart并联机构联合仿真[J].机床与液压, 2016, 44(11): 32-36. doi: 10.3969/j.issn.1001-3881.2016.11.008 Xu H G, Tan J. Co-simulation for 6-UCU Stewart parallel mechanism based on ADAMS and Matlab/Simulink[J]. Machine Tool & Hydraulics, 2016, 44(11): 32-36. doi: 10.3969/j.issn.1001-3881.2016.11.008
[16] 马长林, 李锋, 郝琳, 等.基于Simulink的机电液系统集成化仿真平台研究[J].系统仿真学报, 2008, 20(17): 4578-4581. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200817023 Ma C L, Li F, Hao L, et al. Study of integrated simulation platform for mechanical electro-hydraulic system based on Simulink[J]. Journal of System Simulation, 2008, 20(17): 4578-4581. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200817023
[17] 徐坤, 郑羿, 丁希仑.六轮腿式机器人结构设计与运动模式分析[J].北京航空航天大学学报, 2016, 42(1): 59-71. http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201601010 Xu K, Zheng Y, Ding X L. Structure design and motion mode analysis of a six wheel-legged robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 59-71. http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201601010
[18] 周晓光, 黄景涛. Adams与Simulink的分布式协同仿真[J].计算机工程, 2011, 37(15): 228-231. doi: 10.3969/j.issn.1000-3428.2011.15.074 Zhou X G, Huang J T. Distributed collaborative simulation on Adams and Simulink[J]. Computer Engineering, 2011, 37(15): 228-231. doi: 10.3969/j.issn.1000-3428.2011.15.074
[19] Hong P C. Analysis of articulated chassis kinematics[J]. Mechanical and Manufacturing Science, 2015, 6(12): 25-28.
[20] 魏占国.林木联合采育机底盘设计理论研究与应用[D].北京: 北京林业大学, 2011: 148-156. http://cdmd.cnki.com.cn/Article/CDMD-10022-1011132771.htm Wei Z G. Research and application on design theory of the chassis of forestry felling & cultivation machine[D]. Beijing: Beijing Forestry University, 2011: 148-156. http://cdmd.cnki.com.cn/Article/CDMD-10022-1011132771.htm
[21] 李永泉, 刘天旭, 王立捷, 等. Stewart平台多能域系统动力学全解建模与实验[J].农业机械学报, 2018, 49(4): 404-411. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201804048 Li Y Q, Liu T X, Wang L J, et al. Multi-energy domain dynamic full solution model and experiment of stewart platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 404-411. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201804048
[22] 魏巍, 刘昕晖, 陈延礼, 等.在复杂环境中2自由度轮式铰接车辆的越障能力[J].吉林大学学报(工学版), 2011, 41(5): 1205-1209. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jlgydxzrkxxb201105003 Wei W, Liu X H, Chen Y L, et al. Obstacle surmounting capability of 2-DoF articulated vehicle in rough terrain[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(5): 1205-1209. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jlgydxzrkxxb201105003
[23] 朱阅, 阚江明.三自由度铰接林用底盘的设计与越障性能分析[J].北京林业大学学报, 2016, 38(5): 126-132. doi: 10.13332/j.1000-1522.20150304 Zhu Y, Kan J M. The design of forestry chassis with articulated body of three degrees of freedom and analysis of its obstacle surpassing ability[J]. Journal of Beijing Forestry University, 2016, 38(5): 126-132. doi: 10.13332/j.1000-1522.20150304
[24] 朱阅, 阚江明, 徐道春, 等.森林工程装备底盘研究综述[J].森林工程, 2015, 31(2): 97-102. doi: 10.3969/j.issn.1001-005X.2015.02.021 Zhu Y, Kan J M, Xu D C, et al. A review on the chassis of the forest machine[J]. Forest Engineering, 2015, 31(2): 97-102. doi: 10.3969/j.issn.1001-005X.2015.02.021
































计量
- 文章访问数: 2043
- HTML全文浏览量: 643
- PDF下载量: 28
