
Extraction of topographic information of larch plantation by oblique photogrammetry
-
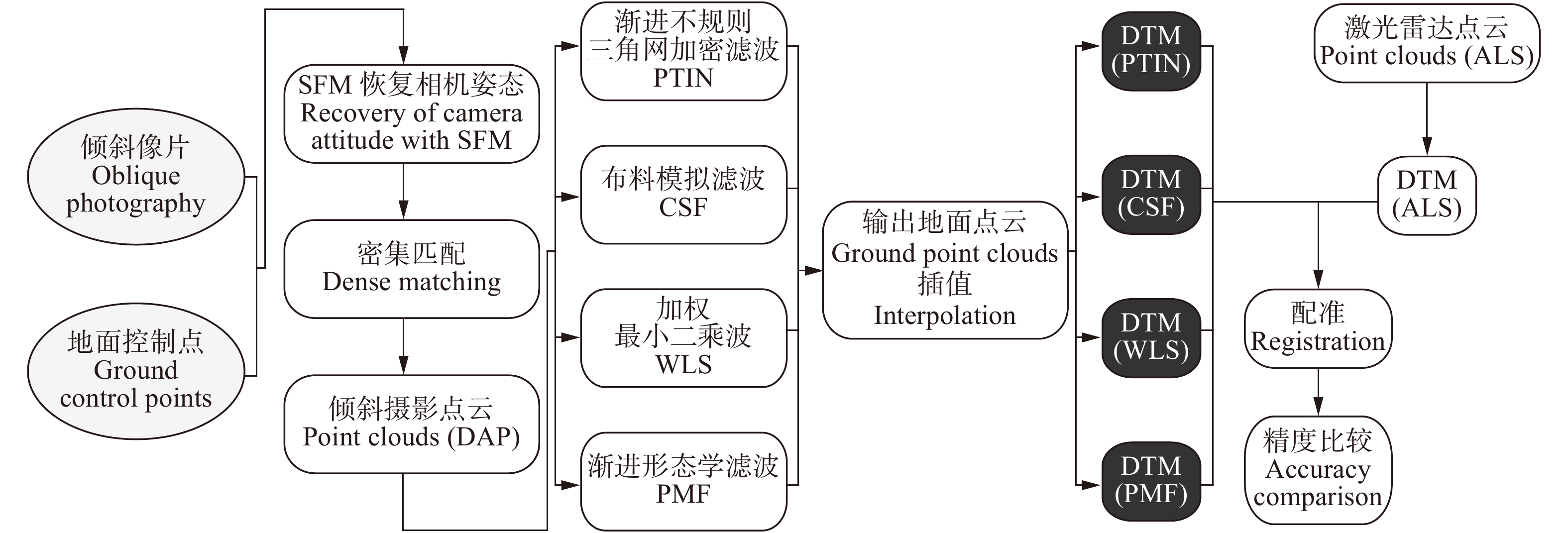
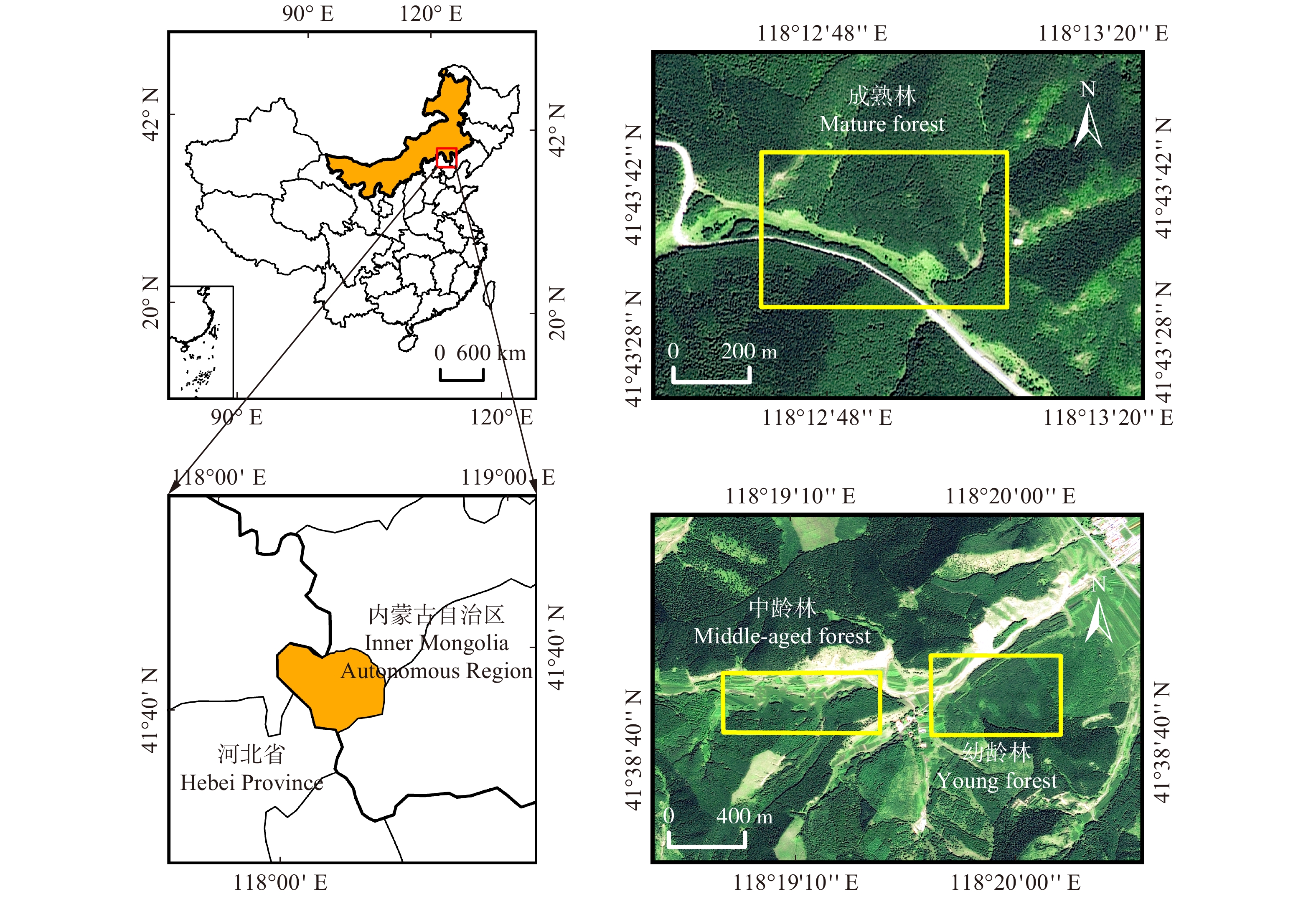
摘要:目的林下地形是提取单木树高、冠幅等森林参数的必备条件,但由于林区地形起伏较大,传统的测量手段难以获取大范围高精度的森林地区数字地形模型(DTM)。近年来,倾斜摄影测量克服了传统测量技术的缺点,成为获取三维地理信息的新型手段。本文使用无人机倾斜摄影测量技术提取落叶松林下地形,并评测精度与适用性,为后续基于倾斜摄影测量技术提取单木参数的研究提供参考。方法选择内蒙古旺业甸林场内山区典型落叶松幼龄林、中龄林和成熟林林分在落叶季进行无人机飞行,采用Context Capture软件对获取的落叶季倾斜像片进行三维重建,生成林区点云。使用布料模拟滤波、加权线性最小二乘、渐进不规则三角网加密法、渐进形态学滤波算法从点云中提取地面点,并采用3种插值方法插值地面点生成测区完整地形。使用激光雷达DTM作为验证数据评价精度。结果不同算法的地形提取精度与郁闭度相关。在幼龄林区域和中龄林区域,布料模拟滤波提取地面点的精度最高,决定系数(R2)均达到0.999,均方根误差(RMSE)分别为1.61 m和0.47 m;在成熟林区域,渐进三角网滤波效果最好,R2为0.999,RMSE为0.39 m。在不同郁闭度林分选择最优滤波算法基础上,比较不同插值方法生成的数字地形模型(DTM)精度,结果表明:在幼龄林和中龄林,布料模拟滤波点云后经不规则三角网(TIN)插值得到的DTM精度最高,RMSE分别为1.58 m和0.44 m;成熟林分渐进不规则三角网加密滤波后地面点经克里金(Kriging)法插值得到的DTM精度最高,RMSE为0.31 m。结论实验证明,倾斜摄影测量技术可用于落叶松林分地形提取。Abstract:ObjectiveThe underforest terrain is a necessary condition for extracting forest parameters such as individual tree height and crown width. However, due to the large terrain fluctuation of the forest area, it is difficult to obtain a large-scale and high-precision digital terrain model (DTM) of forest area by traditional measurement method. Oblique photogrammetry overcomes the shortcomings of traditional measurement technology and becomes a new method to obtain three-dimensional geographic information. In this paper, UAV oblique photogrammetry technology was used to extract the topography of larch forest, and its accuracy and applicability were evaluated. It provides a reference for subsequent research on extracting individual tree parameters based on oblique photogrammetry technology.MethodThe typical young, middle-aged and mature Larix forests in the mountainous area of Wangyedian Forest Farm in Inner Mongolia, northern China were selected for UAV flight in the deciduous season. The oblique images of the deciduous season were reconstructed by Context Capture software to generate point clouds in the forest area. Ground points were extracted from point clouds by cloth simulation filtering (CSF), weighted linear least squares (WLS), progressive irregular triangular network filtering (PTIN) and progressive morphological filtering (PMF), and three interpolation methods were used to interpolate ground points to generate complete topography in the survey area. DTM generated from LiDAR data was used to evaluate the extraction accuracy with validated data.ResultThe results showed that the accuracy of terrain extraction by different algorithms was related to canopy density. In young forest and middle-aged forest area, cloth simulation filter (CSF) had the highest accuracy in extracting ground points from photogrammetric point clouds, with the determination coefficient (R2) reaching 0.999 and the root mean square error (RMSE) reaching 1.61 m and 0.47 m, respectively. In mature forest area, progressive triangulated irregular network (PTIN) had the best effect, with R2 0.999 and RMSE 0.39 m. After selecting the optimal filtering algorithm for different canopy density forest stands, the DTM accuracy of different interpolation methods was compared. The results showed that in young and middle-aged forests, the DTMs both generated by the point clouds of cloth simulation filtering (CSF) and triangulated irregular network (TIN) interpolation had the highest precision, RMSE was 1.58 m and 0.44 m, respectively. In mature forest, the DTM generated by the point clouds of progressive triangulated irregular network flitering (PTIN) and kriging (KRG) interpolation had the highest precision, RMSE was 0.31 m.ConclusionResearch has shown that oblique photogrammetry can be used for topographic extraction of larch forests.
-
Keywords:
- oblique photogrammetry /
- larch /
- point clouds filtering /
- DTM
-
樟子松(Pinus sylvestris var. mongolica)隶属于松科(Pinaceae)松属(Pinus),是欧洲赤松(P. sylvestris)的一个变种,该树种抗旱、耐寒、耐瘠薄、防风固沙、适应性强,能够在降水量低、土壤贫瘠的沙土上顽强生长,是我国北方干旱和半干旱沙区防风固沙和水土保持的重要树种[1-4]。自1964年樟子松在陕西榆林红石峡引种栽培成功后[5],经过几十年的推广造林,已成为毛乌素沙区防风固沙造林的常用树种,对陕北沙区生态环境的改善发挥了重要作用[6-8]。营建樟子松种子园的主要目的是为造林绿化和林业生产提供遗传和品质优良的种子[6],随着樟子松母树年龄和树体高度的增加,采种难度也随之增加,树冠中上部的优质种子难以采收,导致种子质量参差不齐,严重影响了种子的产量和质量[9-10]。因此,矮化樟子松母树已成为沙区樟子松种子园亟待解决的技术问题之一,对种子园母树优质高产和科学管理具有重要意义。
关于种子园母树矮化和结实方面的研究,国内外已有大量报道。地中海白松(P. halepensis)[11]、欧洲赤松[12]、火炬松(P. taeda)[13]、辐射松(P. radiate)[14-16]、红松(P. koraiensis)[17-18]、油松(P. tabulaeformis)[19]、长白落叶松(Larix olgensis)[20]、杏仁桉(Eucalyptus regnans)[21]经过修剪、摘心、截冠等矮化处理后,结实量和种子品质均有所提高。洪永辉等[22-23]和谭小梅等[24]对马尾松二代种子园内的61个无性系母树进行截干处理,发现马尾松母树经过处理后分枝角变大,枝下高降低,冠幅增加,侧枝结果率、球果产量和籽粒质量均提高,采种成本大幅度下降。黄开勇等[25]对杉木种子园大龄母树进行截杆矮化处理,发现大多数杉木无性系母树截杆处理后种子产量明显提高,种子质量明显改善。戴俊等[26]研究发现杉木种子园内经截杆处理后的大部分无性系母树种子的发芽率、发芽势和发芽指数明显提高,且用其种子繁殖的子代苗木地径和苗高均显著高于未截杆处理母树种子繁殖的子代苗木。
目前关于樟子松矮化处理方面的研究报道相对较少。王曼[27]研究发现对老龄樟子松母树进行疏枝、截顶、截轮枝3种修剪措施后,樟子松母树结实量下降;王福森等[10]研究发现幼龄樟子松母树截冠矮化处理后,樟子松母树的单果质量和单株结实量分别提高了46.7%和95.5%,种子的质量增加了107%,发芽率和发芽势分别提高了8.1%和3.1%。截冠处理对樟子松壮龄母树结实方面的影响尚未见报道。本试验以榆林市樟子松种子园的壮龄母树为研究对象,对其进行截冠处理,并以相同系号的未截冠樟子松母树作为对照,研究截冠前后球果产量、球果大小、种子产量及质量指标的变化情况,揭示截冠处理对樟子松壮龄母树结实的影响,探索樟子松壮龄母树管理的关键技术,为樟子松种子园壮龄母树的优质高产和科学管理提供基础资料。
1. 材料方法
1.1 试验地概况
研究区设在陕西省榆林市樟子松种子园(109°46′02″ ~ 109°46′30″E、38°09′06″ ~ 38°09′27″N),位于榆林市城南约15.2 km处,地处毛乌素沙地南缘与黄土丘陵区过渡地带,平均海拔1 024 m。该种子园为西北地区最大的樟子松种子园,属温带半干旱大陆性季风气候,园内年平均气温8.1 ~ 10.7 ℃,极端低温− 32.7 ℃,极端高温38.6 ℃,年平均降水量432 mm,降水主要集中于7—9月,蒸发量大于1 900 mm,年平均风速5.1 m/s,最大风速为28.1 m/s。土壤为沙土和盖沙黄土,通透性好,有机质含量低,为0.32% ~ 0.54%,pH值为6.9 ~ 7.6。研究样地内主要植物有角茴香(Hypecoum erectum)、虎尾草(Chloris virgata)、角蒿(Incarvillea sinensis)、沙打旺(Astragalus adsurgens)、醉马草(Achnatherum inebrians)、冰草(Agropyron cristatum)。目前樟子松种子园内有68个无性系母树,主要源自内蒙古红花尔基天然樟子松林和榆林当地。研究区域内有18个樟子松无性系,树龄均为24年,平均胸径17.16 cm,平均冠幅4.69 m,定植密度5.0 m × 5.0 m。
1.2 试验方法
2016年3月8日至3月11日,对研究区内的18个樟子松无性系母树,按照冠幅不超过10 cm、树高不超过20 cm和胸径不超过1.5 cm的标准,每个无性系挑选出6株樟子松母树用于试验,每个无性系随机选取3株母树进行截冠处理,截去顶部3轮枝,余下的轮枝在每枝距离树干2/3处进行拉枝垂吊处理,并以相同无性系未截冠母树作为对照,截冠处理与未截冠处理的母树均采用相同的抚育管理措施,每年进行正常的施肥和人工除草各1次。
2018年11月15日至20日,对樟子松母树所有球果进行采摘,分别装袋标记。对截冠处理和对照组樟子松的单果质量、单株球果质量、单株种子质量、出籽率、球果的长径和短径、种子千粒质量和优良度8个指标进行测定分析,以此研究截冠处理对樟子松壮龄母树结实的影响。
1.3 数据分析
数据采用Excel 2016和DPS 17.1软件进行处理。对截冠处理母树和未截冠处理母树的各项指标进行统计分析,出籽率(SY)、截冠处理母树各指标相对于未截冠处理母树单个无性系的增益值(Gn)及平均增益值(GA)按照如下公式计算。
SY=P/C×100%, (1) 式中:P为单株种子质量,C为单株球果质量。
Gn=(An−Bn)/Bn×100% (2) 式中:An是第n个无性系樟子松母树截冠处理的指标测定值,Bn为第n号无性系母树未截冠处理的指标测定值。
GA=(G1+G2+G3+⋅⋅⋅Gn)/n×100% (3) 式中:G1、G2、G3、···Gn代表第1、2、3···n个无性系的增益值,n为无性系数量。
采用两配对样本t检验法对单果质量、单株球果质量、单株种子质量、出籽率4个产量指标在截冠处理与对照之间的差异进行分析。
2. 结果与分析
2.1 截冠处理对樟子松壮龄母树球果和种子产量的影响
以截冠处理的18个无性系樟子松母树作为一个样本,以未截冠相对应系号樟子松母树作为另一个样本,进行配对t检验,截冠处理母树与未截冠母树各产量指标的t检验结果见表1。从表1可知,截冠处理母树与未截冠处理母树的单果质量和单株球果质量2个产量指标没有显著性差异(P > 0.05),说明截冠处理对单果质量和单株球果质量影响不显著。樟子松母树的单株种子质量和出籽率在截冠处理与对照之间存在显著差异(P < 0.05),说明截冠处理对种子产量具有显著影响。
表 1 截冠处理母树与未截冠母树各产量指标的配对t检验结果Table 1. Comparing sample t-test results on yield index of mother trees under top pruning and non-top pruning产量指标 Yield index 均值 Mean 标准差 Standard deviation t值 t value 自由度 df P值 P value 单果质量 Single cone mass − 1.022 5.286 0.820 17 0.423 3 单株球果质量 Cone mass per tree − 43.41 688.228 0.268 17 0.792 2 单株种子质量 Seed mass per tree − 5.448 10.492 2.203 17 0.041 7 出籽率 Seed-production rate − 0.408 0.595 2.910 17 0.009 8 2.2 截冠处理对樟子松壮龄母树球果产量的增益分析
截冠处理对樟子松壮龄母树的球果产量增益分析见表2。截冠处理后樟子松母树无性系单果质量增益值在− 62.41% ~ 235.04%之间,平均增益值为24.86%。其中10个无性系母树单果质量为正增益(1、6、28、47、29、13、60、46、34、21),其余8个无性系母树单果质量为负增益。樟子松壮龄母树无性系单株球果质量的增益值在− 61.82% ~ 189.47%之间,平均增益值为23.82%。7个无性系母树单株球果质量为正增益(1、6、47、29、60、34、21),11个无性系母树单株球果质量为负增益。从平均增益值来看,截冠后樟子松壮龄母树球果产量呈增长状态,说明截冠在一定程度上能提高樟子松壮龄母树球果产量。
表 2 截冠处理对樟子松壮龄母树的球果产量增益分析Table 2. Gain analysis on cone yield of aged Pinus sylvestris var. mongolica mother trees after top pruning无性系号
Clone No.对照
CK截冠处理
Top pruning treatment单个无性系截冠后球果产量增益值
Gain value of cone yield of single clone after top pruning/%单果质量
Single cone mass/g单株球果质量
Cone mass per tree/g单果质量
Single cone mass/g单株球果质量
Cone mass per tree/g单果质量
Single cone mass单株球果质量
Cone mass per tree51 9.16 541.43 7.88 533.10 − 13.97 − 1.54 11 7.13 374.93 4.53 281.21 − 36.47 − 25.00 5 7.99 1 140.72 7.24 733.75 − 9.39 − 35.68 7 9.28 1 608.56 7.22 1 265.94 − 22.20 − 21.30 1 6.45 1 308.45 21.61 3 527.86 235.04 169.62 53 11.14 1 412.40 7.36 539.27 − 33.93 − 61.82 6 6.09 634.09 9.63 1 085.75 58.13 71.23 28 5.49 693.81 6.31 639.31 14.94 − 7.86 47 5.92 190.58 15.72 456.31 165.54 139.43 29 6.5 1 473.43 10.10 1 750.91 55.38 18.83 13 9.61 1 680.89 11.03 1 659.67 14.78 − 1.26 38 8.61 1 728.75 6.68 1 198.34 − 22.42 − 30.68 60 5.21 585.68 9.10 1 275.45 74.66 117.77 46 6.23 1 508.47 6.32 1 039.56 1.44 − 31.09 30 13.54 1 301.56 5.09 761.10 − 62.41 − 41.52 40 8.29 1 002.52 4.80 526.41 − 42.10 − 47.49 34 9.00 1 560.54 11.47 1 993.02 27.44 27.71 21 4.54 137.91 6.49 399.21 42.95 189.47 平均增益值
Average gain value/ / / / 24.86 23.82 注:“/”代表此项内容不存在。下同。Notes:“/” represents this content non-existents.The same below. 2.3 截冠处理对樟子松壮龄母树种子产量的增益分析
截冠处理对樟子松壮龄母树种子产量的增益分析见表3。截冠处理后樟子松单株种子质量的增益值在− 65.94% ~ 273.26%之间,其中仅有3个樟子松无性系单株种子质量为负增益(28、38、53),其余15个无性系为正增益。种子出籽率也出现了类似的结果,樟子松种子出籽率的增益值在− 39.33% ~191.38%之间,5个无性系母树种子出籽率为负增益(1、30、38、53、60),其余13个无性系为正增益。单株种子质量的平均增益值是81.38%,出籽率的平均增益值是55.94%,说明截冠处理能提高樟子松壮龄母树种子产量。
表 3 截冠处理对樟子松壮龄母树种子产量增益分析Table 3. Gain analysis on seed yield of aged Pinus sylvestris var. mongolica mother trees after top pruning无性系号
Clone No.对照
CK截冠处理
Top pruning treatment单个无性系截冠后种子产量增益值
Gain value of seed yield of single clone after top pruning/%单株种子质量
Seed mass per tree/g出籽率
Seed-production rate/%单株种子质量
Seed mass per tree/g出籽率
Seed-production rate/%单株种子质量
Seed mass per tree出籽率
Seed-production
rate51 5.11 0.94 10.88 2.04 112.92 117.02 11 3.80 1.01 13.14 1.12 245.79 10.89 5 9.19 0.81 16.85 2.30 83.35 183.95 7 22.36 1.39 22.42 1.77 0.27 27.34 1 13.05 1.00 30.61 0.87 134.56 − 13.00 53 15.21 1.08 5.18 0.96 − 65.94 − 11.11 6 4.86 0.77 16.31 1.5 235.6 94.81 28 11.66 1.68 11.04 1.73 − 5.32 2.98 47 4.77 0.6 7.97 1.09 67.09 81.67 29 20.19 1.37 29.48 1.68 46.01 22.63 13 21.36 1.27 33.17 2.00 55.29 57.48 38 41.35 2.39 17.43 1.45 − 57.85 − 39.33 60 8.34 1.42 14.93 1.17 79.02 − 17.61 46 17.26 1.14 19.63 1.89 13.73 65.79 30 16.08 1.24 19.35 1.23 20.34 − 0.81 40 12.98 1.29 19.96 1.89 53.78 46.51 34 9.05 0.58 33.78 1.69 273.26 191.38 21 7.26 0.51 19.82 1.46 173.00 186.27 平均增益值
Average gain value/%/ / / / 81.38 55.94 2.4 截冠处理对樟子松壮龄母树球果大小的影响
截冠处理对樟子松壮龄母树球果大小的影响见表4。从增益值分析可知,截冠后樟子松壮龄母树球果的平均短径增益值在− 29.36% ~ 42.23%之间,平均增益值为− 0.25%,其中有11个无性系为正增益,7个无性系为负增益。截冠后樟子松壮龄母树球果的平均长径增益值在− 31.59% ~ 43.31%之间,平均增益值为1.37%,其中有7个无性系为正增益,11个无性系为负增益。表5为截冠处理与未截冠处理母树的球果大小指标的配对t检验结果,不难看出,截冠处理与对照母树的球果长径和球果短径均无显著差异(P > 0.05),说明截冠对樟子松壮龄母树球果大小的影响不显著。
表 4 截冠处理对樟子松壮龄母树球果大小的影响Table 4. Effects of top pruning on cone size of aged Pinus sylvestris var. mongolica mother trees无性系号
Clone No.对照
CK截冠处理
Top pruning treatment单个无性系截冠后球果大小增益值
Gain value of cone size of single clone after top pruning/%球果短径
Cone short diameter/mm球果长径
Cone long diameter/mm球果短径
Cone short diameter/mm球果长径
Cone long diameter/mm球果短径
Cone short
diameter球果长径
Cone long
diameter51 19.17 ± 0.30 45.77 ± 1.72 19.81 ± 0.39 42.22 ± 1.43 3.34 -7.75 11 18.51 ± 0.16 40.21 ± 1.20 16.10 ± 0.75 35.78 ± 0.30 − 13.00 − 11.02 5 18.69 ± 0.57 42.66 ± 1.42 19.07 ± 0.45 35.84 ± 2.37 2.05 − 15.99 7 20.37 ± 0.62 45.18 ± 1.21 18.44 ± 0.14 43.86 ± 2.65 − 9.46 − 2.92 1 18.51 ± 0.55 35.45 ± 1.23 20.60 ± 0.07 38.31 ± 1.33 11.29 8.07 53 17.34 ± 0.67 47.49 ± 0.12 18.43 ± 0.50 40.58 ± 0.95 6.29 − 14.54 6 20.60 ± 0.07 38.13 ± 1.33 19.73 ± 0.27 45.19 ± 1.61 − 4.22 18.52 28 21.18 ± 0.47 31.94 ± 2.21 17.61 ± 0.22 35.92 ± 1.59 − 16.86 12.45 47 16.28 ± 0.61 40.08 ± 3.85 23.16 ± 0.41 57.44 ± 1.23 42.23 43.31 29 19.02 ± 0.20 35.32 ± 1.49 20.11 ± 0.98 40.80 ± 1.04 5.73 15.53 13 21.91 ± 0.44 43.40 ± 2.69 22.49 ± 0.73 36.11 ± 2.86 2.65 − 16.8 38 23.91 ± 0.46 40.94 ± 1.51 16.89 ± 0.28 34.57 ± 1.73 − 29.36 − 15.56 60 16.58 ± 0.70 29.48 ± 3.56 19.36 ± 0.30 41.77 ± 2.52 16.74 41.71 46 17.33 ± 0.41 40.45 ± 2.75 17.68 ± 0.51 37.08 ± 1.31 2.02 − 8.34 30 16.58 ± 1.21 51.69 ± 2.73 17.66 ± 0.43 35.36 ± 2.29 6.51 − 31.59 40 20.65 ± 0.17 36.50 ± 1.99 16.14 ± 0.88 35.50 ± 0.86 − 21.83 − 2.74 34 20.68 ± 0.29 42.58 ± 1.81 22.60 ± 0.48 52.22 ± 1.77 9.27 22.64 21 21.94 ± 0.39 33.54 ± 2.12 18.01 ± 0.30 32.80 ± 0.50 − 17.9 − 2.22 平均增益值
Average gain value/ / / / − 0.25 1.37 表 5 截冠处理母树与未截冠母树球果大小指标的配对t检验结果Table 5. Comparing sample t-test results on cone size index of mother trees under top pruning and non-top pruning球果大小指标 Cone size index 均值 Mean 标准差 Standard deviation t值 t value 自由度 df P值 P value 球果短径 Cone short diameter 0.297 8 3.201 0.395 17 0.698 0 球果长径 Cone long diameter − 0.030 0 8.227 0.016 17 0.987 8 2.5 截冠处理对樟子松壮龄母树种子质量的影响
截冠处理对樟子松壮龄母树种子质量的影响见表6,对增益值进行分析可知,樟子松母树无性系截冠后种子千粒质量增益值范围为− 41.8% ~ 68.60%,平均增益值为7.43%,其中仅有6个负增益(5、7、11、28、38、51),其余12个都为正增益;单个无性系截冠后种子优良度增益值为6.25% ~ 45.00%之间,平均增益值为24.96%,且优良度增益全为正增益。截冠处理母树与未截冠母树的种子质量指标的配对t检验结果(见表7),截冠处理母树与对照母树种子千粒质量无显著差异(P > 0.05),截冠处理与对照母树种子优良度有显著差异(P < 0.05),截冠处理对种子千粒质量无明显影响,对种子优良度有明显影响。说明截冠处理可以提高樟子松母树种子质量。
表 6 截冠处理对樟子松壮龄母树种子质量的影响Table 6. Effects of top pruning on seed quality of aged Pinus sylvestris var. mongolica mother trees无性系号
Clone No.对照
CK截冠处理
Top pruning treatment单个无性系截冠后种子质量增益值
Gain value of seed quality of single clone after top pruning/%种子千粒质量
Thousand seed mass/g优良度
Seed soundness /%种子千粒质量
Thousand seed mass/g优良度
Seed soundness/%种子千粒质量
Thousand seed
mass优良度
Seed soundness51 10.48 ± 0.02 45 ± 1.28 8.72 ± 0.02 54 ± 1.56 − 16.79 20.00 11 9.45 ± 0.07 48 ± 1.35 7.95 ± 0.04 55 ± 1.78 − 15.87 14.58 5 7.89 ± 0.04 55 ± 1.02 7.04 ± 0.04 62 ± 1.87 − 10.77 12.73 7 8.36 ± 0.06 54 ± 1.32 6.11 ± 0.07 67 ± 1.71 − 26.91 24.07 1 9.10 ± 0.08 44 ± 1.09 13.2 ± 0.03 57 ± 2.43 45.05 29.55 53 7.04 ± 0.08 49 ± 1.43 9.57 ± 0.01 62 ± 2.10 35.94 26.53 6 7.42 ± 0.06 55 ± 1.52 8.50 ± 0.04 61 ± 1.37 14.56 10.91 28 7.56 ± 0.13 47 ± 1.76 4.40 ± 0.04 57 ± 1.56 − 41.80 21.28 47 7.62 ± 0.05 38 ± 1.24 9.86 ± 0.01 53 ± 1.62 29.40 39.47 29 5.86 ± 0.06 40 ± 1.31 9.88 ± 0.02 58 ± 2.02 68.60 45.00 13 8.83 ± 0.03 51 ± 1.27 11.13 ± 0.03 61 ± 1.74 26.05 19.61 38 9.73 ± 0.03 48 ± 1.42 7.39 ± 0.06 51 ± 2.48 − 24.05 6.25 60 7.18 ± 0.08 38 ± 1.24 7.90 ± 0.03 50 ± 1.91 10.03 31.58 46 8.85 ± 0.11 41 ± 1.44 8.96 ± 0.02 53 ± 2.13 1.24 29.27 30 7.96 ± 0.03 39 ± 1.09 8.03 ± 0.02 53 ± 1.53 0.88 35.90 40 7.75 ± 0.03 53 ± 1.53 8.86 ± 0.01 59 ± 1.41 14.32 11.32 34 6.41 ± 0.06 47 ± 1.43 7.69 ± 0.04 66 ± 2.66 19.97 40.43 21 7.84 ± 0.03 52 ± 1.47 8.15 ± 0.03 68 ± 1.73 3.95 30.77 平均增益值
Average gain value/ / / / 7.43 24.96 表 7 截冠处理与未截冠母树种子质量指标的配对t检验结果Table 7. Comparing sample t-test results on seed quality index of mother trees under top pruning and non-top pruning种子质量指标 Seed quality index 均值 Mean 标准差 Standard deviation t值 t value 自由度 df P值 P value 种子千粒质量 Thousand seed mass − 0.445 2.133 0.885 17 0.388 5 种子优良度 Seed soundness − 11.278 4.390 10.900 17 0.000 1 3. 讨 论
樟子松无性系种子园母树的矮化技术,既能降低樟子松母树结实高度便于球果采集,又能促进樟子松结实和提高种子的产量和质量,近年来成为种子园母树科学经营管理的研究热点[10,28-29]。本研究对樟子松种子园18个无性系壮龄母树进行截冠处理,发现截冠处理母树和未截冠处理母树的单果质量和单株球果质量的统计学未达到显著水平,但二者的增益值分别达24.84%和23.82%,说明截冠在一定程度上能提高樟子松壮龄母树球果产量;这和辐射松[14]、油松[19]、大龄杉木[25]的研究结果一致。本研究发现,樟子松壮龄母树截冠处理后单株种子质量和种子出籽率明显提高,平均增益值分别达81.38%、55.94%,配对t检验显示差异显著,说明截冠处理对种子产量有明显促进作用。这和幼龄樟子松[10]、红松[18]、油松[19]、大龄杉木[25]、马尾松[30]的研究结果一致。一般来说,截冠处理消除了顶端优势,营养物质向母树中下部运输,同时冠幅增加,通风透光条件得到改善,树势增强,从而提高了母树的产量。
目前关于樟子松矮化处理和种子结实方面的研究报道不多。王福森等[10]研究发现截冠处理后樟子松母树的单果质量增加了46.7%,单株结实量增加了95.5%,种子产量增加了1.07倍。本研究发现截冠处理后樟子松母树的单果质量、单株结实量和种子的产量增加值均低于王福森等[10]的研究结果。原因可能是前者的试验研究区位于黑龙江省龙江县错海林场,降水量相对较高、蒸发量相对低;而本研究的试验区域位于毛乌素沙地,降雨量少、蒸发量大[31],生长环境较前者相对恶劣;另一个原因可能是,前者在幼龄期对樟子松母树进行截冠处理,而本研究是壮龄期对樟子松母树进行截冠处理,幼龄樟子松的恢复能力比壮龄樟子松的恢复能力强。这和王玉光等[18]的研究结果一致,即红松母树在幼龄截干矮化后结实量比在壮龄期截干矮化结实量大。本研究发现截冠处理后12个无性系母树种子千粒质量增加,全部无性系母树种子优良度提高,说明截冠处理能明显提高樟子松母树的种子优良度和种子质量。这和王福森等[10]对幼龄樟子松母树的研究结果一致。
截冠处理对松科和杉科(Taxodiaceae)树种球果大小的影响的研究报道较少。谭小梅等[24]研究发现马尾松经截冠处理后球果的长径和短径分别增加了8.02%和7.44%。黄开勇等[25]研究发现,截冠处理对杉木球果大小有一定影响,对球果长径和球果短径在同一无性系之间影响一致。本研究发现,截冠处理对樟子松母树球果大小也有一定的影响,但对球果长径和球果短径在同一无性系之间影响不一致。分析原因可能是不同树种的生物学特性导致的差异,或者是截冠处理影响了球果长径和短径的变化,具体原因需进一步研究。
樟子松壮龄母树截干后单果质量、单株球果质量、单株种子质量、出籽率和种子千粒质量5个指标,在不同无性系之间差异较大,不同指标间规律性不强,原因可能是樟子松不同无性系截冠处理后表现不同,也可能是截冠处理选择样本的重复数过少造成的,具体原因尚需进一步探索。本研究还发现7个无性系(1、6、21、28、34、47、60)母树的单果质量和单株球果质量增益值均为正值,8个无性系(5、7、11、28、30、40、51、53)母树的单果质量和单株球果质量增益值均为负值。在今后的研究中,根据本试验的研究结果分别对截冠处理后单果质量和单株球果质量增益值为正值和负值的母树进行挑选,重新配置样地,然后进行截冠处理,同时增加无性系母树的重复株数,以此得到更为科学客观的结果。
值得一提的是,对于樟子松种子园壮龄母树来说,经过多次截冠处理来降低母树高度,不一定符合生产实际,主要原因是多次截干处理会造成樟子松树势衰弱,病虫害频发等问题[6,10],此外也增加了成本。在实际的樟子松种子园经营管理中,最好的方法是对壮龄母树一次截冠使其降低到合理高度,且截冠处理以后要对樟子松母树进行科学和精心的管护。因此,樟子松母树截冠处理后,对其进行4个方向的拉枝垂吊处理,改变枝条的生长方向,缓和枝条长势,建立良好的冠形结构。这样处理会增加樟子松母树的空间利用率,改善母树的光照条件,增加樟子松对病虫害的抵抗能力,也可以促进花芽分化,增加有效结实部位,同时促进营养物质在树体合理分配,提高结实的产量和种子质量。
4. 结 论
对种子园18个无性系樟子松壮龄母树进行截冠处理,对比分析截冠处理和未截冠处理对樟子松壮龄母树球果产量、种子产量、球果大小及种子质量的影响,主要结论如下:
(1)截冠处理对母树单果质量和单株球果质量2个指标影响不显著,其平均增益值分别达24.84%和23.82%;说明截冠处理在一定程度上能提高樟子松壮龄母树球果产量。截冠处理对母树单株种子质量和种子出籽率有明显影响,说明截冠处理能明显提高樟子松壮龄母树种子产量。截冠处理对球果长和短径均无明显影响,截冠处理对樟子松壮龄母树球果大小影响不显著。
(2)截冠处理后大部分无性系母树种子千粒质量为正增益,全部无性系母树种子优良度为正增益。说明截冠处理可以提高樟子松壮龄母树种子质量。总之,本研究证明截冠可以提高樟子松壮龄母树产量和种子质量。
-
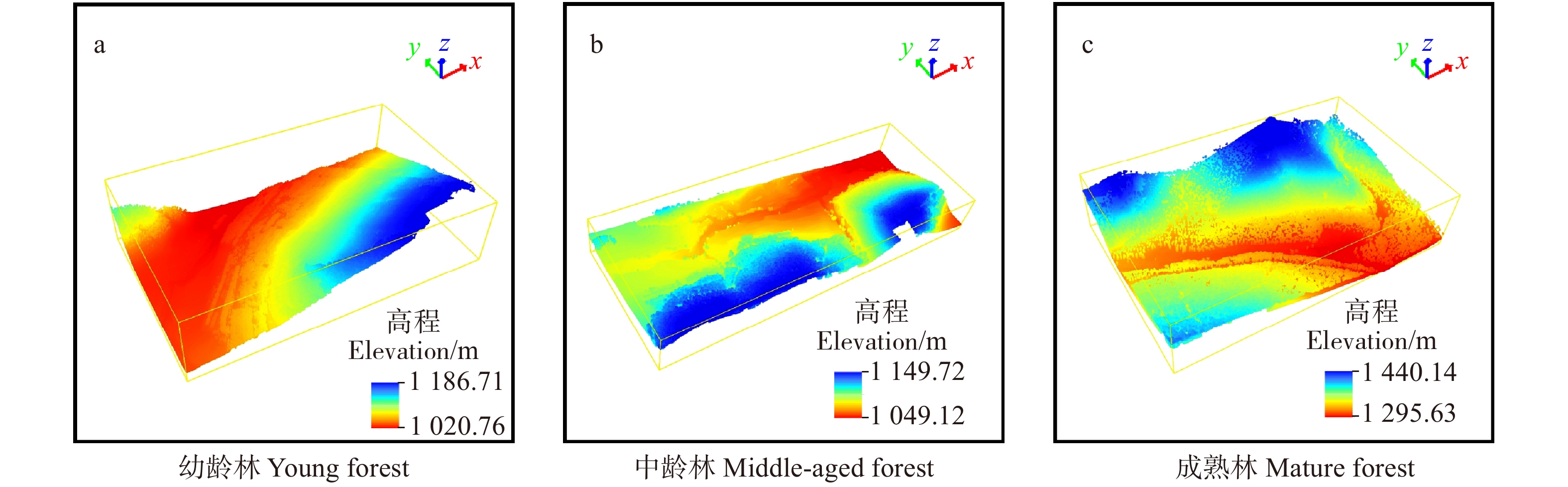
![]()
图 2 倾斜摄影测量点云
a. 幼龄林点云Point clouds of young forest; b. 中龄林点云Point clouds of middle-aged forest; c. 成熟林点云Point clouds of mature forest
Figure 2. Oblique photogrammetric point clouds
![]()
图 3 激光雷达得到的数字地形模型
a. 幼龄林点云DTM of young forest; b. 中龄林点云DTM of middle-aged forest; c. 成熟林点云DTM of mature forest
Figure 3. Digital terrain model generated from LiDAR
![]()
图 5 不同滤波算法在不同林分倾斜摄影点云中滤波结果
a. 幼龄林布料模拟滤波结果; b. 中龄林布料模拟滤波结果; c. 成熟林布料模拟滤波结果; d. 幼龄林加权最小二乘滤波结果; e. 中龄林加权最小二乘滤波结果; f. 成熟林加权最小二乘滤波结果; g. 幼龄林渐进不规则三角网加密滤波结果; h. 中龄林渐进不规则三角网加密滤波结果; i. 成熟林渐进不规则三角网加密滤波结果; j. 幼龄林渐进形态学滤波结果; k. 中龄林渐进形态学滤波结果; l. 成熟林渐进形态学滤波结果
a. CSF filtering results of young forest; b. CSF filtering results of middle-aged forest; c. CSF filtering results of mature forest; d. WLS filtering results of young forest; e. WLS filtering results of middle-aged forest; f. WLS filtering results of mature forest; g. PTIN filtering results of young forest; h. PTIN filtering results of middle-aged forest; i. PTIN filtering results of mature forest; j. PMF filtering results of young forest; k. PMF filtering results of mature forest; l. PMF filtering results of mature forestFigure 5. Filtering results of different filtering algorithms in oblique photographic point cloud
![]()
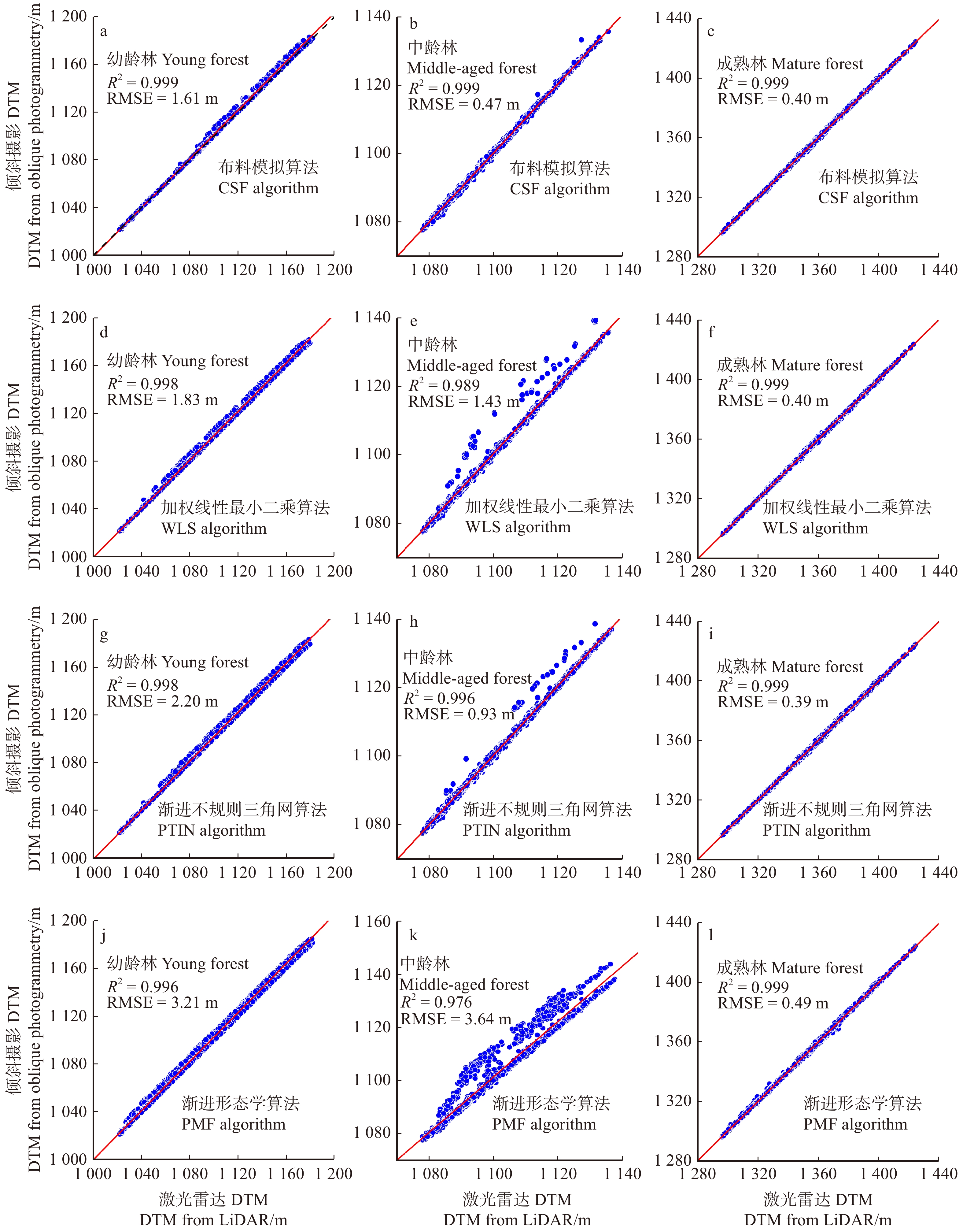
图 6 不同滤波方法滤波精度
a. 幼龄林布料模拟滤波精度; b. 中龄林布料模拟滤波精度; c. 成熟林布料模拟滤波精度; d. 幼龄林加权最小二乘滤波精度; e. 中龄林加权最小二乘滤波精度; f. 成熟林加权最小二乘滤波精度; g. 幼龄林渐进不规则三角网加密滤波精度; h. 中龄林渐进不规则三角网加密滤波精度; i. 成熟林渐进不规则三角网加密滤波精度; j. 幼龄林渐进形态学滤波精度; k. 中龄林渐进形态学滤波精度; l. 成熟林渐进形态学滤波精度
a. CSF filtering accuracy of young forest;b. CSF filtering accuracy of middle-aged forest; c. CSF filtering accuracy of mature forest; d. WLS filtering accuracy of young forest; e. WLS filtering accuracy of middle-aged forest; f. WLS filtering accuracy of mature forest; g. PTIN filtering accuracy of young forest; h. PTIN filtering accuracy of middle-aged forest; i. PTIN filtering accuracy of mature forest; j. PMF filtering accuracy of young forest; k. PMF filtering accuracy of mature forest; l. PMF filtering accuracy of mature forestFigure 6. Accuracy of filtering methods using different methods in different forest areas
![]()
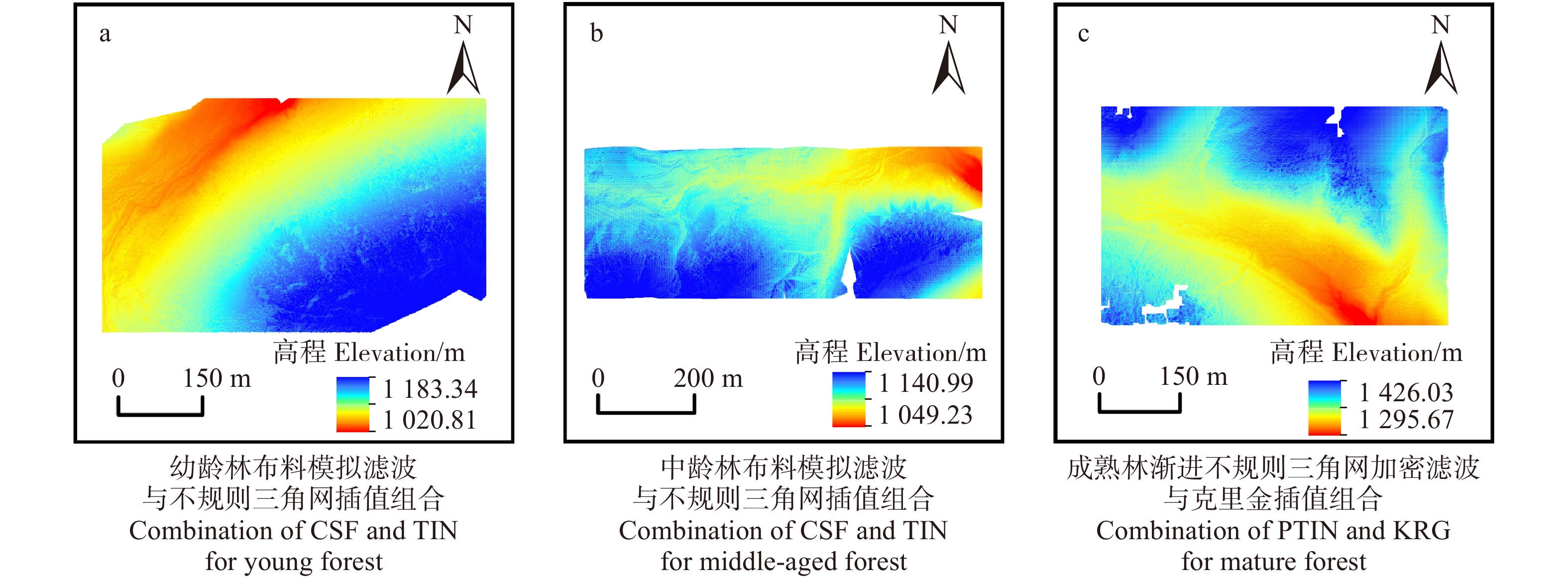
图 7 倾斜摄影地面点插值后的地形
a. 幼龄林点云DTM of young forest; b. 中龄林点云DTM of middle-aged forest; c. 成熟林点云DTM of mature forest
Figure 7. Optimal DTMs of different forests after interpolation
表 1 无人机相机及飞行参数
Table 1 Unmanned aerial vehicle camera and flight parameters
传感器及飞行参数
Sensors and flight parameters参数值
Parameter values尺寸 Size 35.9 mm × 24 mm 航向重叠 Course overlap 0.8 旁向重叠 Side overlap 0.7 水平速度 Horizontal velocity/(m·s− 1) 4 ~ 8 飞行高度 Flight altitude/m 200 地面分辨率 Ground resolution/cm 3 曝光间隔 Exposure interval/s < 4.5 焦距 Focal length/mm 35 倾斜角度 Oblique angle 45° 单个相机像素 Single camera pixel 4 200 × 104  下载: 导出CSV
下载: 导出CSV
表 2 无人机激光雷达及飞行参数
Table 2 Unmanned aerial vehicle LiDAR and flight parameters
传感器及飞行参数
Sensors and flight parameters参数值
Parameter values激光有效扫描角 Laser effective scanning angle/(°) 1 550 光束发散角 Beam divergence angle mrad 0.5 光斑直径 Spot diameter/cm 20 扫描速度 Scanning speed/(r·s− 1) 360 脉冲发射频率 Pulse emission frequency/Hz 112 幅宽 Camera width/m 1 040 飞行高度 Flight alitutude/m 300 飞行速度 Flight speed/(m·s− 1) 4.8
下载: 导出CSV
表 3 倾斜摄影点云误差改正值
Table 3 Elevation error correction number of point cloud by oblique photogrammetry
林分类型 Forest type 幼龄林 Young forest 中龄林 Middle-aged forest 成熟林 Mature forest 高程系统误差 Elevation system error/m 1.178 1.731 5.250
下载: 导出CSV
表 4 加权最小线性二乘法参数表
Table 4 Parameters in weighted linear least squares prediction filtering algorithm
林分类型 Forest type 参数g Parameter g 参数w Parameter w 格网大小 Grid size/m 迭代次数 Iterative time 幼龄林 Young forest 0.1 0.3 4 8 中龄林 Middle-aged forest 0.1 0.3 6 8 成熟林 Mature forest 0 0.4 8 10
下载: 导出CSV
表 5 成熟林区域不同滤波算法组合插值方法地形精度
Table 5 Topographic accuracy of combination interpolation method with different filtering algorithms in mature forest region
m 项目 Item RMSE 不规则三角网插值
Triangulated irregular network (TIN)反距离权重插值
Inverse distance weighted (IDW)克里金插值
kriging (KRG)布料模拟滤波
Cloth simulation filter (CSF)0.37 0.42 0.42 加权线性最小二乘
Weighted linear least squares (WLS)0.35 0.44 0.43 渐进不规则三角网
Progressive triangulated irregular network (PTIN)0.32 0.32 0.31 渐进形态学滤波
Progressive morphological filter (PMF)0.34 0.36 0.36
下载: 导出CSV
-
[1] Mcelhinny C, Gibbons P, Brack C, et al. Forest and woodland stand structural complexity: its definition and measurement[J]. Forest Ecology and Management, 2005, 218(1−3): 1−24. doi: 10.1016/j.foreco.2005.08.034
[2] Keith H, Mackey B G, Lindenmayer D B. Re-evaluation of forest biomass carbon stocks and lessons from the world’s most carbon-dense forests[J]. Proceedings of the National Academy of Sciences of the United States of America, 2009, 106(28): 11635−11640. doi: 10.1073/pnas.0901970106
[3] 冯静静, 张晓丽, 刘会玲. 基于灰度梯度图像分割的单木树冠提取研究[J]. 北京林业大学学报, 2017, 39(3):16−23. Feng J J, Zhang X L, Liu H L. Single tree crown extraction based on gray gradient image segmentation[J]. Journal of Beijing Forestry University, 2017, 39(3): 16−23.
[4] 李欢, 李明泽, 范文义, 等. 基于机载激光雷达的林隙结构参数提取[J]. 林业科学, 2018, 54(10):98−107. doi: 10.11707/j.1001-7488.20181012 Li H, Li M Z, Fan W Y, et al. Canopy gap structure parameters extraction based on light detection and ranging (LiDAR)[J]. Scientia Silvae Sinicae, 2018, 54(10): 98−107. doi: 10.11707/j.1001-7488.20181012
[5] Barnes C, Balzter H, Barrett K, et al. Individual tree crown delineation from airborne laser scanning for diseased larch forest stands[J]. Remote Sensing, 2017, 9(3): 231−251. doi: 10.3390/rs9030231
[6] Ota T, Ogawa M, Shimizu K, et al. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest[J]. Forests, 2015, 6(11): 3882−3898.
[7] 李增元, 刘清旺, 庞勇. 激光雷达森林参数反演研究进展[J]. 遥感学报, 2016, 20(5):1138−1150. Li Z Y, Liu Q W , Pang Y. Review on forest parameters inversion using LiDAR[J]. Journal of Remote Sensing, 2016, 20(5): 1138−1150.
[8] 刘清旺, 李世明, 李增元, 等. 无人机激光雷达与摄影测量林业应用研究进展[J]. 林业科学, 2017, 53(7):134−148. doi: 10.11707/j.1001-7488.20170714 Liu Q W, Li S M, Li Z Y, et al. Review on the applications of UAV-Based LiDAR and photogrammetry in forestry[J]. Scientia Silvae Sinicae, 2017, 53(7): 134−148. doi: 10.11707/j.1001-7488.20170714
[9] Dandois J P, Ellis E C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision[J]. Remote Sensing of Environment, 2013, 136: 259−276. doi: 10.1016/j.rse.2013.04.005
[10] 徐思奇, 黄先锋, 张帆, 等. 倾斜摄影测量技术在大比例尺地形图测绘中的应用[J]. 测绘通报, 2018(2):111−115. Xu S Q, Huang X F, Zhang F, et al. Oblique photogrammetric technique applied in surveying and mapping large-scale topographic map[J]. Bulletin of Surveying and Mapping, 2018(2): 111−115.
[11] 周晓敏, 孟晓林, 张雪萍, 等. 倾斜摄影测量的城市真三维模型构建方法[J]. 测绘科学, 2016, 41(9):159−163. Zhou X M, Meng X L, Zhang X P, et al. A method for urban real 3D model building based on oblique photogrammetry[J]. Science of Surveying and Mapping, 2016, 41(9): 159−163.
[12] 杨国东, 王民水. 倾斜摄影测量技术应用及展望[J]. 测绘与空间地理信息, 2016, 39(1):13−15, 18. doi: 10.3969/j.issn.1672-5867.2016.01.004 Yang G D, Wang M S. The tilt photographic measuration technique and expectation[J]. Geomatics & Spatial Information Technology, 2016, 39(1): 13−15, 18. doi: 10.3969/j.issn.1672-5867.2016.01.004
[13] 魏占玉, Ramon A, 何宏林, 等. 基于SfM方法的高密度点云数据生成及精度分析[J]. 地震地质, 2015, 37(2):636−648. doi: 10.3969/j.issn.0253-4967.2015.02.024 Wei Z Y, Ramon A, Heng H L, et al. Accuracy analysis of terrain point cloud acquired by “structure from motion” using aerial photos[J]. Seismology and Geology, 2015, 37(2): 636−648. doi: 10.3969/j.issn.0253-4967.2015.02.024
[14] Lin J, Wang M, Ma M, et al. Aboveground tree biomass estimation of sparse subalpine coniferous forest with UAV oblique photography[J]. Remote Sensing, 2018, 10(11): 1849−1868. doi: 10.3390/rs10111849
[15] 陈崇成, 李旭, 黄洪宇. 基于无人机影像匹配点云的苗圃单木冠层三维分割[J]. 农业机械学报, 2018, 49(2):149−155, 206. doi: 10.6041/j.issn.1000-1298.2018.02.020 Chen C C, Li X, Huang H Y. 3D Segmentation of individual tree canopy in forest nursery based on drone image-matching point cloud[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 149−155, 206. doi: 10.6041/j.issn.1000-1298.2018.02.020
[16] Wallace L, Lucieer A, Malenovsky Z, et al. Assessment of forest structure using two UAV techniques: a comparison of airborne laser scanning and structure from motion (SfM) point clouds[J]. Forests, 2016, 7(3): 62−78.
[17] Sithole G, Vosselman G. Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds[J]. Isprs Journal of Photogrammetry and Remote Sensing, 2004, 59(1−2): 85−101. doi: 10.1016/j.isprsjprs.2004.05.004
[18] Silva C A, Klauberg C, Hentz M K, et al. Comparing the performance of ground filtering algorithms for terrain modeling in a forest environment using airborne LiDAR data[J/OL]. Floresta e Ambiente, 2018, 25(2): e20160150 [2018−08−12]. http://dx.doi.org/10.1590/2179-8087.015016.
[19] 汪垚, 张志玉, 倪文俭, 等. 基于机载LiDAR数据的林下地形提取算法比较与组合分析[J]. 北京林业大学学报, 2017, 39(12):25−35. Wang Y, Zhang Z Y, Ni W J, et al. Comparison of filter algorithms and combination analysis for DEM extracting based on airborne laser scanning point clouds[J]. Journal of Beijing Forestry University, 2017, 39(12): 25−35.
[20] 胡永杰, 程朋根, 陈晓勇, 等. 机载激光雷达点云滤波算法分析与比较[J]. 测绘科学技术学报, 2015, 32(1):72−77. doi: 10.3969/j.issn.1673-6338.2015.01.015 Hu Y J, Cheng P G, Chen X Y, et al. The analysis and comparison of airborne LiDAR point cloud filter algorithms[J]. Journal of Geomatics Science and Technology, 2015, 32(1): 72−77. doi: 10.3969/j.issn.1673-6338.2015.01.015
[21] White J C, Tompalski P, Coops N C, et al. Comparison of airborne laser scanning and digital stereo imagery for characterizing forest canopy gaps in coastal temperate rainforests[J]. Remote Sensing of Environment, 2018, 208: 1−14. doi: 10.1016/j.rse.2018.02.002
[22] Zhang W, Qi J, Wan P, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6): 501−523. doi: 10.3390/rs8060501
[23] Axelsson P. DEM generation from laser scanner data using adaptive TIN models[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(B4/1, PART4): 111−118.
[24] Vosselman G. Slope based filtering of laser altimetry data[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(B3/2, PART3): 935−942.
[25] Zhang K Q, Chen S Q. A progressive morphological filter for removing nonground measurements from airborne LIDAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 4(41): 872−882.
[26] 段祝庚, 肖化顺, 袁伟湘. 基于离散点云数据的森林冠层高度模型插值方法[J]. 林业科学, 2016, 52(9):86−94. Duan Z G, Xiao H S, Yuan W X. Comparison of interpolation methods of forest canopy height model using discrete point cloud data[J]. Scientia Silvae Sinicae, 2016, 52(9): 86−94.
[27] 王彬, 孙虎, 徐倩, 等. 基于无人3D摄影技术的雪松(Cedrus deodara)群落高度测定[J]. 生态学报, 2018, 38(10):3524−3533. Wang B, Sun H, Xu Q, et al. Height measurement of a cedar (Cedrus deodara) community based on unmanned aerial vehicles (UAV) 3D photogrammetry technology[J]. Acta Ecologica Sinica, 2018, 38(10): 3524−3533.
[28] Ni W, Sun G, Pang Y, et al. Mapping three-dimensional structures of forest canopy using UAV stereo imagery: evaluating impacts of forward overlaps and image resolutions with LiDAR data as reference[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(10): 3578−3589. doi: 10.1109/JSTARS.2018.2867945
-
期刊类型引用(6)
1. 林秀云,孙圆,刘晨曦,姚睿涵,周春国,曹林,曹福亮. 依据地面激光扫描数据的杉木材积建模与造材. 东北林业大学学报. 2022(01): 33-39 .  百度学术
百度学术
2. 李沛婷,赵庆展,田文忠,马永建. 结合无人机载LiDAR点云法向量的K-means++聚类精简. 国土资源遥感. 2020(02): 103-110 . 百度学术
3. 程子阳,任国全,张银. 扫描线段特征用于三维点云地面分割. 光电工程. 2019(07): 111-120 . 百度学术
4. 蔡越,徐文兵,梁丹,邓愫愫,李翀. 基于激光回波强度判别毛竹年龄. 中国激光. 2018(01): 272-280 . 百度学术
5. 曾碧,黄文. 一种融合多特征聚类集成的室内点云分割方法. 计算机工程. 2018(03): 281-286 . 百度学术
6. 田青华,白瑞林,李杜. 基于改进欧氏聚类的散乱工件点云分割. 激光与光电子学进展. 2017(12): 316-324 . 百度学术
其他类型引用(7)





计量
- 文章访问数: 3120
- HTML全文浏览量: 1294
- PDF下载量: 126
- 被引次数: 13
