
Wildlife image screening for infrared cameras based on YOLOv7
-
摘要:目的
野外环境通常植被繁茂、树木杂乱,且受环境、天气、光照等因素影响,红外相机易误触发拍摄,从而捕获大量废片,需要耗费大量人力进行筛选。为解决此类问题,本研究以YOLOv7模型为基础,对其进行轻量化改进,以实现对废片的自动筛选。
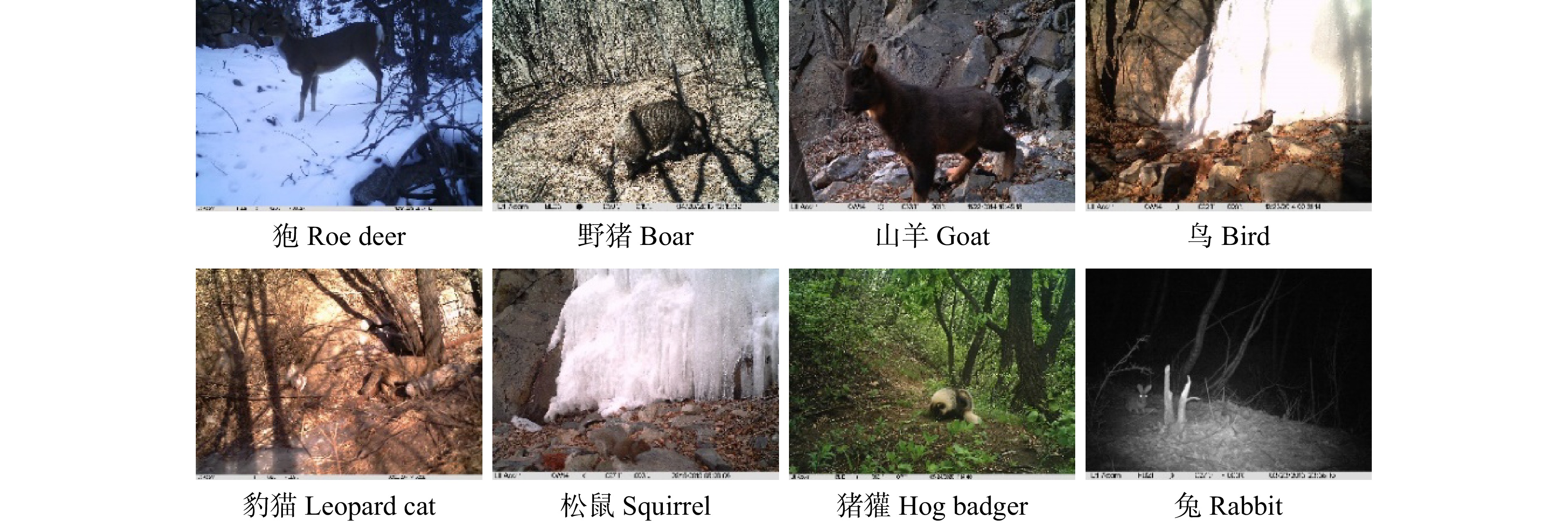
方法本研究构建了北京密云雾灵山自然保护区2014—2015年期间采集到的2 172张野生动物图像数据集,并对图像中出现的动物进行位置标记。对YOLOv7网络使用不同方式进行改进:引入MicroBlock替换YOLOv7的主干网络,使用轻量化SPPCSPC结构降低模型参数量。采用SIoU损失、LNDown下采样、BiFPN提升模型检测动物的能力。使用YOLOv5-m、YOLOv5-l、Ghost-YOLOv5-l、YOLOv6、YOLOX-M、YOLOR-CSP模型,在含有1万张图像的Snapshot Serengeti相机陷阱图像子数据集上进行训练和验证,对比本文模型对野生动物图像的筛选效果。利用迁移学习训练自建野生动物数据集,测试冻结不同层数的训练效果。
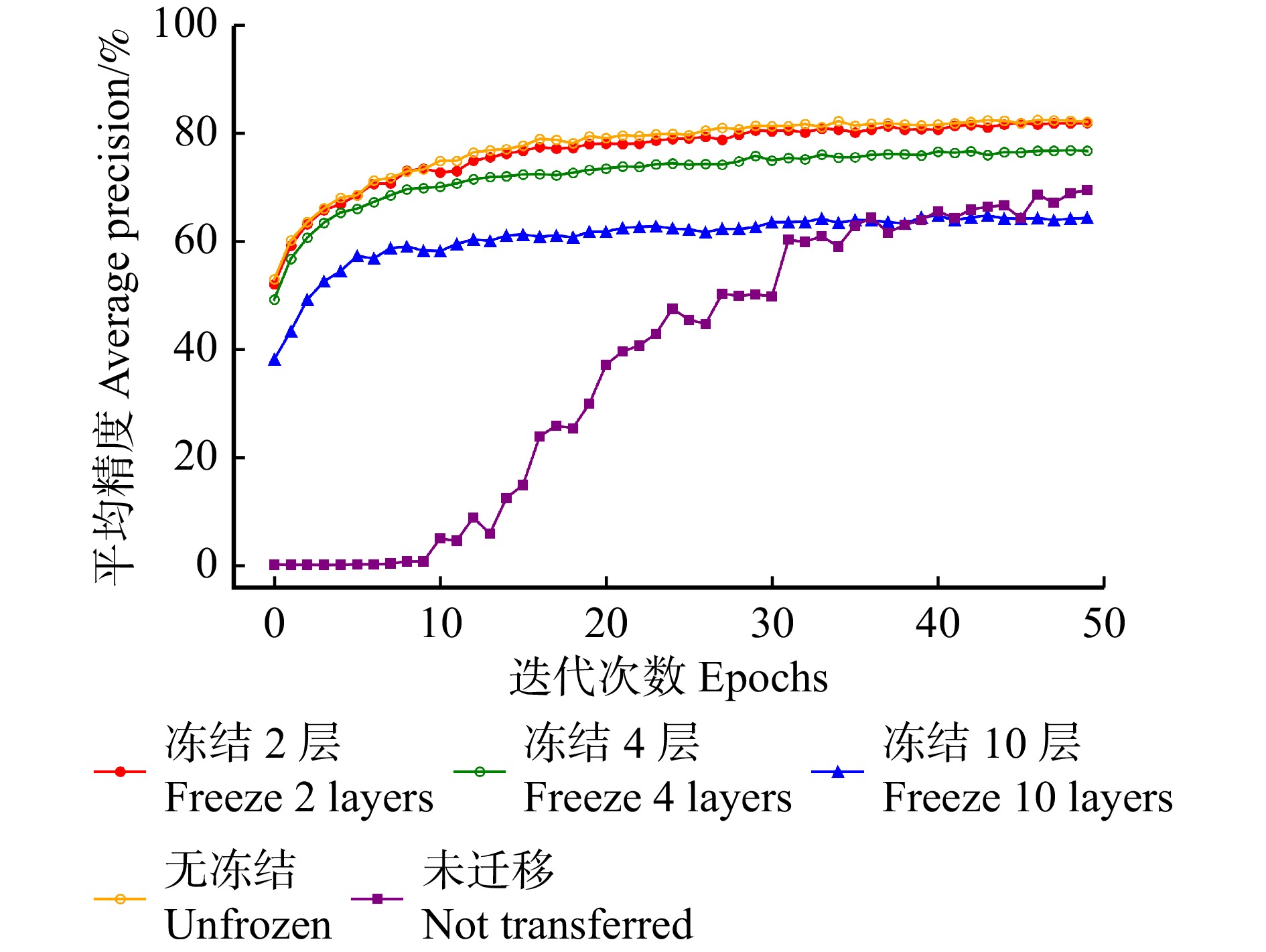
结果基于YOLOv7的改进模型推理时间降低了14.3%,每秒浮点运算次数FLOPS降低了33.5%,参数量减少了17.8%,误检测方面也优于YOLOv7模型。与其他模型进行对比,改进后的YOLOv7虽未在所有指标中均达到最优,但在检测时间与精度上达到了更好的平衡。在自建数据集中使用未冻结权重方式微调效果最优,平均精度比未使用迁移学习模型提高了12.6%。
结论本研究为密云地区野生动物监测网络提供了更快速、准确的筛选方案。
Abstract:ObjectiveDue to the lush vegetation and disorderly trees in the wild environment, as well as the influence of factors such as environment, weather, and lighting, infrared cameras are prone to triggering shooting errors, resulting in the capture of a large amount of waste film, which requires a lot of manpower for screening. To solve such problems, based on the YOLOv7 model, this paper has made lightweight improvements to achieve automatic screening of waste pieces.
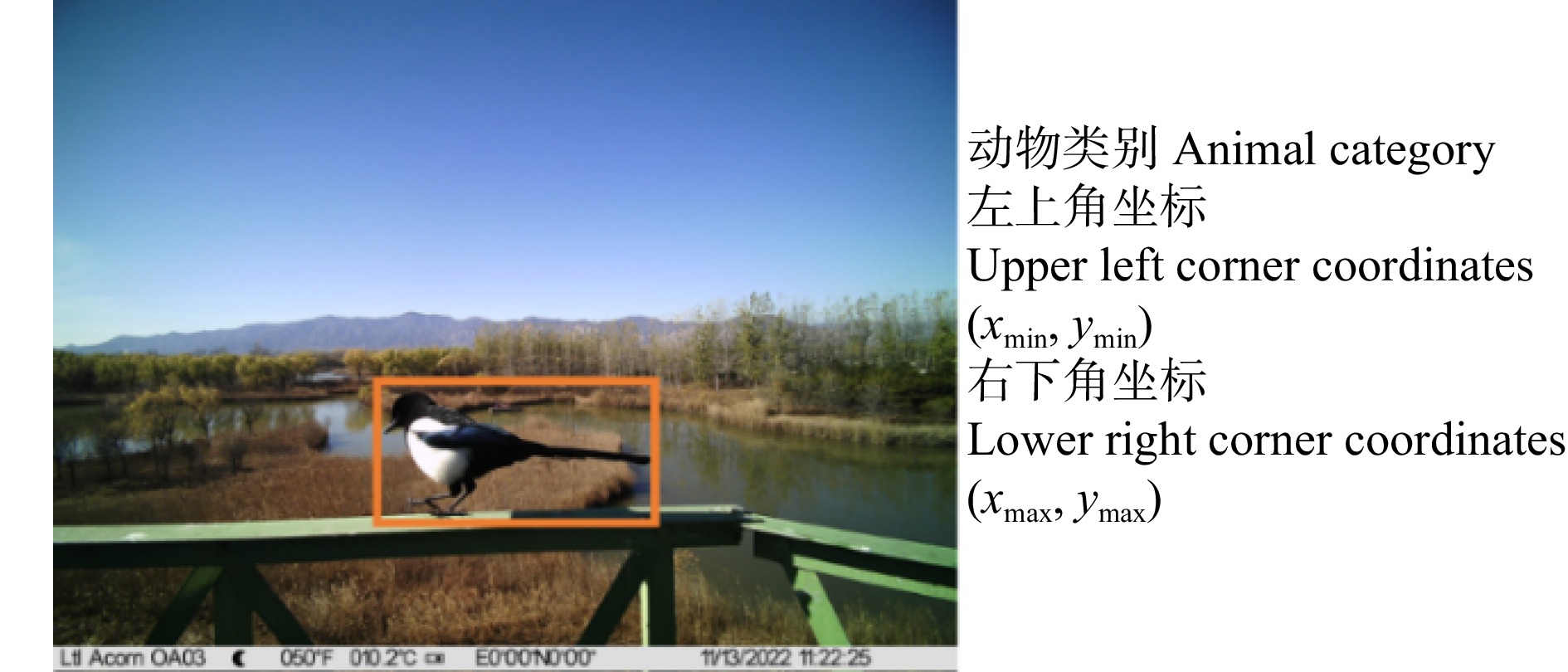
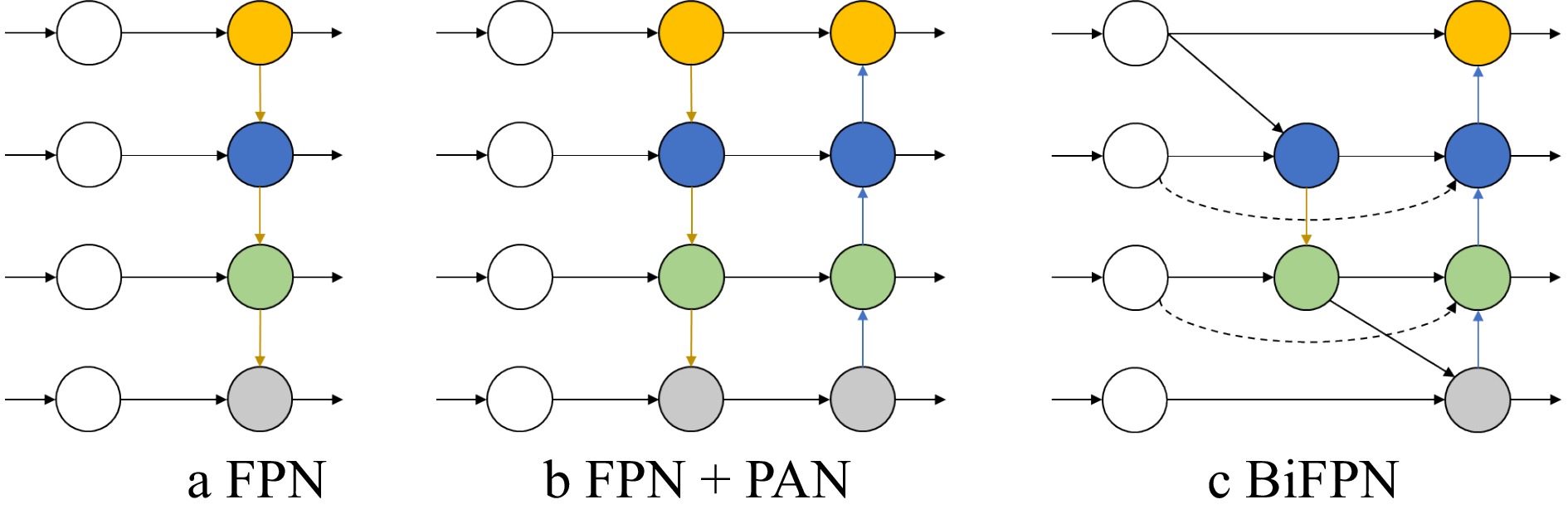
MethodThis study constructed a dataset of 2 172 wildlife images collected from the Beijing Wuling Mountain Nature Reserve in the period of 2014−2015, and marked the positions of animals in the images. YOLOv7 network was improved in different ways. MicroBlock was introduced to replace the backbone network of YOLOv7, and the SPPCSPC structure was light-weighted to reduce the model parameters. SIoU loss, LNDown downsampling, and BiFPN were used to improve the model’s ability to detect animals. YOLOv5-m, YOLOv5-l, Ghost-YOLOv5-l, YOLOv6, YOLOX-M, and YOLOR-CSP models were trained on an Snapshot Serengeti camera trap subset dataset containing 10 000 images, and the screening effects of the model on wildlife images were compared. Transfer learning was used to train a self-built wildlife dataset, and the training effects of freezing different layers was tested.
ResultThe improved model based on YOLOv7 reduced inference time by 14.3%, floating-point operations per second by 33.5%, and parameters by 17.8% compared with the YOLOv7 network. The error detection of the improved YOLOv7 model was also better than that of YOLOv7. Although the improved YOLOv7 did not achieve the best performance in all indicators compared with other models, it achieved a better balance between detection time and accuracy. In the self-built dataset, the unfrozen weight method had the best effect, and average precision was 12.6% higher than that of the model without transfer learning.
ConclusionThis study provides a faster and more accurate screening solution for wildlife monitoring networks in the Mountain area of Beijing Miyun.
-
Keywords:
- wildlife image /
- image filtering /
- deep learning /
- object detection
-
塑−木插接节点是一种塑料与木材插接连接的节点形式,此节点通常位于塑料椅的坐面与椅腿连接部位及靠背的装配接合处等,这些位置都是关键的受力点,如若配合参数设计不佳在使用过程中则容易出现松动、变形及断裂等现象,从而降低产品的使用寿命[1-3]。目前关于家具结构节点的研究仍然以木家具的榫卯节点为主,其研究方向主要为对影响节点强度的设计参数的优化[4-7],对提高速生材节点强度的新型接合方式的探索[8]以及对人工板材家具构件的连接方式与接合强度的研究等[9-10]。本次研究对影响节点强度的不同参数组合的节点试件分别进行抗拔强度与抗弯强度试验,并通过响应面法对试验数据进行回归分析,从而得到塑−木插接节点的配合特性和最优的配合参数,为塑料家具插接结构设计提供方法和数据参考。
1. 材料与方法
1.1 材料与设备
本研究的试验材料为:聚丙烯(PP),生产厂商为台湾李长荣化工,型号为(福聚)/7012;榉木(Fagus sylvatica),购于本地木材市场,含水率为11.91% ~ 12.03%,气干密度为0.689 ~ 0.710 g/m3[11]。主要试验设备为:海天塑机HTF110X;原力WPC数控机床,加工精度为0.01 mm;日本岛津AG-X万能力学试验机及相关夹具;精密推台锯、横截锯等。试验选择在温度20 ℃、相对湿度50%的恒温恒湿的室内环境下进行。
1.2 试件的制备
榉木试件的制作:首先选取无缺陷榉木原料,使用推台锯与横截锯将其开成截面为40 mm × 40 mm,长度为140 mm的长方形试件坯料,通过刨切加工使其表面平整光滑,然后使用数控机床按照图1a所示的样式和参数将其一头加工成圆棒,存放于干燥环境中备用。PP塑料试件的制作:首先使用Creo软件按照图1b所示结构与尺寸进行三维建模,将建好后的模型交给模具厂进行开模,待模具制作完成后通过注塑成型获得试件。试件的装配:按照图1c所示装配方式,使用木槌对各组试件进行装配,将装配好的试件放置在恒温恒湿环境中一周后进行试验。
![]() 图 1 试件尺寸与插接方式t为塑料件壁厚,单位为mm;d为接合长度,单位为mm;f为过盈配合量,单位为mm;Φ为圆棒直径,单位为mm。t is wall thickness of plastic parts (mm), d is inserting length (mm), f is interference fit (mm), and Φ is diameter of rod (mm).Figure 1. Size of specimens and method of connection
图 1 试件尺寸与插接方式t为塑料件壁厚,单位为mm;d为接合长度,单位为mm;f为过盈配合量,单位为mm;Φ为圆棒直径,单位为mm。t is wall thickness of plastic parts (mm), d is inserting length (mm), f is interference fit (mm), and Φ is diameter of rod (mm).Figure 1. Size of specimens and method of connection1.3 试验方法
本研究主要考察塑−木插接节点的配合参数对其接合强度的影响。根据Box-Behnken试验设计原理,在其他设计条件都一定的情况下,选取塑料件壁厚t、接合长度d和过盈配合量f为考察因素,以节点构件的抗拔强度与抗弯强度为响应目标,进行3因素3水平的响应面分析,利用Design-Expert软件对数据进行回归分析,建立数学模型,预测节点构件最佳力学性能状态下的配合参数。通过预组装单因素测试,接合长度的取值范围为30 ~ 50 mm,单边过盈配合量在0.05 ~ 0.15 mm。根据塑料件成型工艺原理,PP材料较大型构件的合理壁厚范围为2.4 ~ 3.2 mm[12],由此确定各因子水平(表1)。
表 1 试验因子水平设置Table 1. Experiment factor levels因素 Factor 水平 Level − 1 0 1 壁厚 Wall thickness of plastic parts (t)/mm 2.4 2.8 3.2 接合长度 Inserting length (d)/mm 30 40 50 配合量 Interference fit (f)/mm 0.05 0.10 0.15 由于该节点的接合强度分别表现为抗拔强度与抗弯强度,因此需要将每组试件分成两批,分别进行抗拔性能与抗弯性能试验。
1.3.1 塑−木插接节点的抗拔性能测试
将试件按照如图2所示方法固定在力学试验机上,以0.05 mm/s的速率垂直向上加载,将榉木榫头从塑料接口中匀速拔出,行程达到10 mm时停止试验,获得其最大抗拔力。以上试验共15组,每组重复6次,共计90个试件。
![]() 图 2 抗拔性能测试加载方式1. 试件组件Assembly of specimen;2. 固定支架Fixed support;3. 夹具Fixture;P. 载荷Load/N.Figure 2. Loading mode of anti-pulling strength experiment
图 2 抗拔性能测试加载方式1. 试件组件Assembly of specimen;2. 固定支架Fixed support;3. 夹具Fixture;P. 载荷Load/N.Figure 2. Loading mode of anti-pulling strength experiment1.3.2 塑−木插接节点的抗弯性能测试
将试件按照如图3所示方法固定在力学试验机上进行弯曲破坏试验,通过加载端以0.05 mm/s的速率匀速向下加载,在测得弯曲载荷经过最大值并开始出现减小趋势时停止试验,获得其最大弯曲破坏载荷。试验组与试验次数安排与抗拔性能试验相同。
![]() 图 3 抗弯性能测试加载方式1. 试件组件Assembly of specimen;2. 固定支架Fixed support;3. 夹具Fixture;P. 载荷Load/N.Figure 3. Loading mode of bending strength experiment
图 3 抗弯性能测试加载方式1. 试件组件Assembly of specimen;2. 固定支架Fixed support;3. 夹具Fixture;P. 载荷Load/N.Figure 3. Loading mode of bending strength experiment1.3.3 不同装配方式节点的抗拔性能对比测试
由于节点的配合形式对接合强度有显著的影响,为了能够进一步提高塑−木插接节点的接合强度,因此在以上研究的基础上分别对以下3种不同配合形式节点进行了抗拔性能的对比分析:选择以0.15 mm的过盈配合量进行装配(Ⅰ型节点);采用在配合间隙为0的接合面涂白胶装配(Ⅱ型节点);采用在配合间隙为0的接合面法向安装GB/T 950-86-M2 × 20木螺钉(Ⅲ型节点)。试件尺寸和装配如图1,其中塑料件壁厚2.4 mm、接合长度50 mm。采用图2所示的方法进行试验,测得各个类型节点的最大抗拔力,并对节点的破坏形式和抗拔力进行对比分析。试验共3组,每组重复6次,共计18个试件。
2. 结果与分析
根据表1所示的水平与因素对试件分批进行抗拔性能与抗弯性能试验,试验结果见表2。将试验结果输入design-expert软件进行响应面回归分析,获得相应的拟合编码方程式(1)和式(2),其中Y1表示极限抗拔力,Y2表示极限弯曲载荷,由方程得到的预测值如表2所示。
表 2 响应面分析试验设计及结果Table 2. Experiment design and results of response surface method试验号
No.塑料件壁厚
Wall thickness of plastic
parts (t)/mm接合长度
Inserting length (d)/mm配合量
Interference fit (f)/mm抗拔力
Withdrawal force/N弯曲载荷
Bending load/N试验值
Experiment value预测值
Prediction value试验值
Experiment value预测值
Prediction value1 0 0 0 765.7 846.0 1 046.1 1 066.0 2 0 0 0 851.2 846.0 1 065.7 1 066.0 3 0 − 1 − 1 186.6 214.0 743.6 757.8 4 0 1 − 1 445.0 419.0 1 213.2 1 221.7 5 0 − 1 1 1 075.1 1 101.2 829.8 821.3 6 1 − 1 0 447.5 459.1 874.6 868.6 7 1 1 0 992.6 1 057.6 1 305.9 1 305.6 8 0 1 1 1 677.8 1 650.5 1 211.9 1 197.7 9 − 1 0 1 629.8 668.7 935.6 943.8 10 0 0 0 921.1 846.0 1 086.3 1 066.0 11 1 0 − 1 258.9 220.0 1 138.2 1 130.0 12 − 1 1 0 237.2 225.6 1 076.7 1 082.7 13 1 0 1 1 826.5 1 788.9 1 110.6 1 125.1 14 − 1 − 1 0 134.8 69.8 679.2 679.5 15 − 1 0 − 1 81.3 118.9 914.0 899.5 Y1=846.0+305.3t+188.57d+529.68f+110.68td+254.78tf+86.08df−269.99t2−122.99d2+123.11f2 (1) Y2=1066.03+102.97t+210.06d+9.86f+8.45td−12.3tf−21.87df−28.48t2−53.45d2−12.95f2 (2) 2.1 塑−木插接节点的配合特性分析
该节点是通过榉木构件与塑料构件插接装配而成,在实际使用中构件之间不能够产生松动或晃动,否则会造成节点力学性能的失效,因此构件之间必须采用过盈配合的方式装配才能保证节点接合强度,其配合量则是影响强度大小的关键因素。一般来说,选择较大的过盈配合量可以获得更好的接合强度,但过大的过盈配合量又可能导致装配困难或塑料构件的损伤,因此需要控制在合适的范围内。经组装测试得出该节点试件的过盈配合量在0.15 mm以内较为合适。
本次研究中的塑料构件采用了注射成型,受工艺的限制,构件接口的内壁与脱模方向会存在一定的脱模角度。在本次试验中将脱模角假设为0°,而实际试件为0.5°,因此这会给节点试件的配合量造成一定的误差,从而影响到整体的接合强度。研究表明:随着接合长度的增加,试验得出的抗拔力比理论值略微偏大,但对抗弯强度没有影响。接合面的粗糙度同样会对节点的抗拔强度产生影响,然而由于脱模角度不宜设计过大,因此塑料件的内壁必须设计成光滑面,否则会造成脱模困难。
2.2 构件强度对节点接合强度的影响
节点的强度是建立在构件的强度之上的,若要获得较好的节点整体强度,首先必须保证构件自身的强度。在试验过程中,塑料构件的破坏程度明显大于榉木构件,说明其强度要远低于榉木构件,由此可见,塑料件的强度会对节点的整体接合强度产生决定性的影响。
通过design-expert软件单因素分析可以获得在插接长度为40 mm,过盈配合量为0.1 mm的条件下塑料件壁厚对节点接合强度的影响结果(图4),其中构件的力学强度主要表现为塑料件壁厚,壁厚越大,强度越高。由图4可见节点的抗拔力和弯曲载荷都随着塑料构件壁厚的增加而增加。当塑料件壁厚由2.4 mm增大为2.8 mm时,节点的抗拔力增加较为显著,其主要是由于较薄的塑料件壁厚会产生较大的弹性变形,从而降低了节点接合面的摩擦力所致;当塑料件壁厚由2.8 mm增大为3.2 mm时,节点的抗拔力增加较小,这说明通过增加壁厚来提高节点的抗拔力有一定的限制。同时,节点的弯曲载荷随着塑料件壁厚的增加呈线性增加趋势,这说明增加壁厚可以有效改善构件的抗弯强度,然而由于成型工艺的限制塑料构件的壁厚不能无限制的增加,因此其力学强度不能够仅通过增加壁厚的方式来改善。在实际应用中其他的一些结构强化方式可以综合采用来增强塑料构件的强度,然而这对本次研究的结果并不会产生影响。
2.3 塑−木插接节点配合参数优化
2.3.1 塑−木插接节点抗拔性能分析
在抗拔试验中,试件的破坏特征不明显,外观无明显的痕迹。对试验后的塑料试件测量后发现接口尺寸略微增大,重新装配后进行抗拔试验,发现节点的抗拔力有不同程度的减小。这说明塑料构件在装配过程中已经发生了塑性变形,多次装配会导致节点强度的部分失效。
表3是对抗拔试验结果进行的方差分析,结果显示塑料件壁厚、接合长度和过盈配合量的P值都小于0.05,说明这3个设计因素对节点的抗拔强度都有显著影响。模型的F值为75.34,P < 0.000 1,说明建立的模型是显著的,试验结果中不会产生突变量,这种试验方法是可靠的。决定系数R2为0.992 7,信噪比为27.391,说明拟合方程式(1)有较高的拟合度与可靠性,可以用来对塑−木插接节点的抗拔强度进行预测。本次试验中变异系数值(10.95%)较高,说明试验的精确度有所欠缺,这很有可能是受到塑料构件接口处脱模角度的影响,因为脱模角度会导致过盈配合量的误差产生。
表 3 抗拔强度方差分析Table 3. ANOVA of tensile strength方差来源 Variance source 平方和 Sum of squares df 均方 Mean square F P 显著性 Significance 模型 Model 4.006 × 106 9 4.451 × 105 75.34 < 0.000 1 *** 塑料件壁厚 Wall thickness of plastic parts (t) 7.457 × 105 1 7.457 × 105 126.21 < 0.000 1 *** 接合长度 Inserting length (d) 2.845 × 105 1 2.845 × 105 48.15 0.001 0 ** 配合量 Interference fit (f) 2.244 × 106 1 2.244 × 106 379.88 < 0.000 1 *** td 48 995.82 1 48 995.82 8.29 0.034 6 ** tf 2.596 × 105 1 2.596 × 105 43.95 0.001 2 ** df 29 635.62 1 29 635.62 5.02 0.075 2 — t2 2.691 × 105 1 2.691 × 105 45.55 0.001 1 ** d2 55 849.57 1 55 849.57 9.45 0.027 6 ** f2 55 963.15 1 55 963.15 9.47 0.027 5 ** 残差 Residual 29 541.45 5 5 908.29 失拟项 Lack of fit 17 426.31 3 5 808.77 0.96 0.546 9 纯误差 Pure error 12 115.14 2 6 057.57 总和 Cor total 4.036 × 106 14 注:拟合度 = 0.992 7;校正拟合度 = 0.979 5;预测拟合度 = 0.924 2;信噪比 = 27.391;变异系数 = 10.95%。“***”表示非常显著;“**”表示显著;“—”表示不显著。Notes: R2 = 0.992 7; Adj R2 = 0.979 5; Pred R2 = 0.924 2; Adeq precision = 27.391; C.V. = 10.95%. “***” means very significant; “**” means significant; “—” means non-significant. 图5为各个设计因素对节点抗拔力共同作用的响应面模型。由图5a可见:当塑料件壁厚较小时,接合长度对抗拔力的影响不大,而随着壁厚的增加,接合长度对抗拔力的影响增大;壁厚在2.4 ~ 2.8 mm之间时,曲面较为陡峭,抗拔力增长趋势明显;当壁厚在2.8 ~ 3.2 mm之间时,曲面趋于平坦,抗拔力增长趋势放缓。由图5b同理可得:当塑料件壁厚较大时,过盈量对抗拔力的影响更为显著。当过盈量较大时,壁厚对抗拔力的影响也更为显著。通过分析发现:这个现象是由于塑料构件本身的弹性引起的,随着壁厚的增加,塑料件的弹性会相应减小;同样配合量的条件下,壁厚大的节点构件接触面上的压力更大,而接触面的压力越大,其摩擦力也越大,节点的抗拔力也就越大。因此节点为了能够获得较好的力学性能,塑料件壁厚参数应该尽可能地设计大一些。
2.3.2 塑−木插接节点抗弯性能分析
在抗弯试验中节点的破坏形式如图6所示,其主要表现为由于应力集中而导致的塑性变形发白及断裂。图6是壁厚相同而榫头长度不同的构件节点的破坏特征,主要表现为:30 mm榫头长度的试件破坏特征是接口下方严重的发白变形,说明此处在试验中产生了过大的应力;40 mm榫头长度的试件破坏特征依然发生在接口下方,但同时在接口的上方出现了一道塑性变形发白,说明在试验中应力得到了分散,节点的抗弯强度得到了提高;50 mm榫头长度的试件在接口下方仅出现微小的变形发白,而且塑料件还发生了断裂现象,断裂处有明显的发白变形,说明试验中塑料件的上部产生较大的应力,这时候节点的强度主要表现为塑料构件的强度。由此可见,随着接合长度的增加,试验过程中构件产生的应力集中问题可以得到改善;在参数优化过程中,当节点的抗弯强度受到构件强度限制时,首先应该考虑的是提高塑料构件的强度。
![]() 图 6 抗弯试验中塑−木插接节点的破坏形式Figure 6. Destroy type of plastic-wood insert joint in bending strength experiment
图 6 抗弯试验中塑−木插接节点的破坏形式Figure 6. Destroy type of plastic-wood insert joint in bending strength experiment表4是对抗弯试验结果进行的方差分析,结果显示:塑料件壁厚与接合长度的P值小于0.05,而过盈配合量的P值为0.220 6,大于0.05,说明抗弯强度受塑料件壁厚与接合长度这两因素的影响显著,不受过盈配合量的影响。模型的F值为127.02,P < 0.000 1,说明建立的模型是显著的,试验结果中不会产生突变量,这种试验方法是可靠的。决定系数R2为0.995 6,信噪比为38.462,说明拟合方程式(2)有较高的拟合度与可靠性,可以用来对塑−木插接节点的抗弯强度进行预测。本次试验中变异系数值为1.96%,远小于10%,说明试验的精确度很高,试验结果真实可靠。
表 4 抗弯强度方差分析Table 4. ANOVA of bending strength方差来源 Variance source 平方和 Sum of squares df 均方 Mean square F P 显著性 Significance 模型 Model 4.544 × 105 9 50 485.3 127.02 < 0.000 1 *** 塑料件壁厚 Wall thickness of plastic parts (t) 84 830.8 1 84 830.8 213.44 < 0.000 1 *** 接合长度 Inserting length (d) 3.53 × 105 1 3.53 × 105 888.19 < 0.000 1 *** 配合量 Interference fit (f) 778.15 1 778.15 1.96 0.220 6 — td 285.61 1 285.61 0.72 0.435 3 — tf 605.16 1 605.16 1.52 0.272 1 — df 1 914.06 1 1 914.06 4.82 0.079 6 — t2 2 994.69 1 2 994.69 7.53 0.040 6 ** d2 10 550.21 1 10 550.21 26.54 0.003 6 ** f2 619.61 1 619.61 1.56 0.267 1 — 残差 Residual 1 987.23 5 397.45 失拟项 Lack of fit 1 179.05 3 393.02 0.97 0.543 0 纯误差 Pure error 808.19 2 404.09 总和 Cor total 1.564 × 105 14 注:拟合度 = 0.995 6;校正拟合度 = 0.987 8;预测拟合度 = 0.954 7;信噪比 = 38.462;变异系数 = 1.96%。“***”表示非常显著;“**”表示显著;“—”表示不显著。Notes: R2 = 0.995 6; Adj R2 = 0.987 8; Pred R2 = 0.954 7; Adeq precision = 38.462; C.V.= 1.96%. “***” means very significant; “**” means significant; “—” means non-significant. 图7为各个设计因素对节点弯曲载荷共同作用的响应面模型。由图7a可见:在不同的塑料件壁厚与接合长度下,弯曲载荷都出现了单调性的增长。这说明塑料件壁厚与接合长度都对节点抗弯强度有影响,但不产生交互影响。由图7b可见:塑料件壁厚一定时,配合量的变化不会引起弯曲载荷的改变。这说明塑料件壁厚对节点抗弯强度没有影响。对比两幅图可以发现:接合长度引起弯曲载荷的变化最为明显,塑料件壁厚的影响稍弱。因此增加接合长度是提高节点抗弯强度最有效的方法。
2.3.3 配合参数的优化与验证
在对试验结果进行响应面分析的基础上,通过design-expert软件的优化模块对各个设计因素进行优化。首先定义各因子在设计域内,设定抗拔力与弯曲载荷目标值高于试验最大值两倍以上,然后对模型进行优化求解,得到优化结果(表5)。为了判断优化方案的准确性和有效性,接下来还需要通过物理试验对优化结果进行验证。将试验设计中各因素的中间水平设为初始值,优化求解结果设为优化值,接着分别制作试件进行抗拔强度和抗弯强度试验,最终试验结果如表5所示。试验结果显示:初始参数下节点的极限抗拔力为846.0 N,优化后提高到2 139.3 N,改进率为152.9%,预测值为2 051.2 N,与试验值非常接近;初始参数下的极限弯曲载荷为1 066.1 N,优化后提高到1 306.4 N,改进率为22.5%,预测值为1 268.3 N,同样与试验值非常接近。由此可以证明该优化过程和优化方案是准确可靠的。
表 5 优化方案与结果Table 5. Schemes and results of optimization项目 Item 配合参数 Matching parameter/mm 抗拔力
Withdrawal force/N弯曲载荷
Bending load/N塑料件壁厚
Wall thickness of
plastic part (t)/mm接合长度
Inserting length (d)/mm配合量
Interference fit (f)/mm初始值 Initial value 2.8 40 0.10 846.0 1 066.1 优化预测值 Prediction value of optimization 3.2 50 0.15 2 051.2 1 268.3 优化试验值 Experiment value of optimization 3.2 50 0.15 2 139.3 1 306.4 2.4 试验结果对比分析
对3种不同装配类型的塑−木插接节点进行抗拔试验,试验结果如图8所示,平均抗拔力大小依次为:Ⅰ型节点996.5 N < Ⅱ型节点1 251.4 N < Ⅲ型节点1 607.6 N。对比可以得知:Ⅱ型节点的平均抗拔力比Ⅰ型节点大了25.6%,约为254.9 N;Ⅲ型节点的平均抗拔力比Ⅰ型节点大了61.3%,约为611.1 N;Ⅲ型节点的平均抗拔力比Ⅱ型节点大了28.4%,约为356.2 N。这说明接合面涂胶和安装木螺丝的装配方式都能够提高塑−木插接节点的抗拔力,而安装木螺丝比接合面涂胶的效果更明显。
图9为不同类型节点在抗拔试验中的破坏形式。Ⅰ型节点主要表现为榫头从塑料构件接口中拔出,外观无其他明显破坏痕迹,由于塑料件的弹性,节点构件在进行重新组装后能够很大程度上恢复节点的力学性能。Ⅱ型节点主要表现为胶层与塑料件接合面的脱离,由于胶水对木材具有渗透性,木材表面的胶层剥离强度要远大于塑料,因此塑料件接合面胶层的更易发生剥离。Ⅲ型节点主要表现为木螺丝的歪曲变形并致使构件挤压破损,拉伸载荷使得在安装木螺丝的部位产生了应力集中,从而导致构件的局部破坏,如若增加木螺丝数量则可以有效地分担应力,进一步增加节点的抗拔强度。
3. 结论与讨论
本研究在不同配合参数的塑−木插接节点的力学试验基础上,对试验结果进行了响应面分析,并通过拟合方程获得了各个参数的最优解。试验证明优化方案比初始方案节点的力学性能有了明显的改善,这说明响应面方法可以用来解决多个因变量的结构节点中配合参数的优化设计问题,从而为家具结构设计提供了理论指导和数据参考。方差分析表明:塑料件壁厚t、接合长度d和过盈配合量f这3个设计因素均对节点的抗拔强度有显著影响,而抗弯强度只受塑料件壁厚与接合长度这两个因素的影响,与过盈配合量无关。优化结果显示:节点的极限抗拔力从846.0 N提高到2 139.3 N,改进率为152.9%,极限弯曲载荷从1 066.1 N提高到1 306.4 N,改进率为22.5%。通过分析可以发现:各设计参数在设计域内靠近上限取值较易获得最大接合强度,而节点的抗弯强度改进率相对较低,是由于受到塑料构件强度的限制。对比试验结果表明:在节点的接合面法向安装木螺丝能够有效地提高节点的抗拔强度。
本研究是从配合参数优化的方向尝试改善塑−木插接节点的力学性能,但影响结构节点强度的因素还有很多,并且各因素之间是相互联系且共同作用的。关于该节点力学性能的研究还可以从以下几个方面展开:不同材料因素对节点强度产生的影响;塑料构件接合面的脱模角度和接合面的粗糙度对节点强度的影响等。此外,近年来计算机辅助工程(CAE)技术越来越广泛地被用来解决各种工程结构的优化问题[13],不少学者正在尝试将其运用到家具结构的优化设计中来,这也是后续值得进一步探索的研究方向。
-
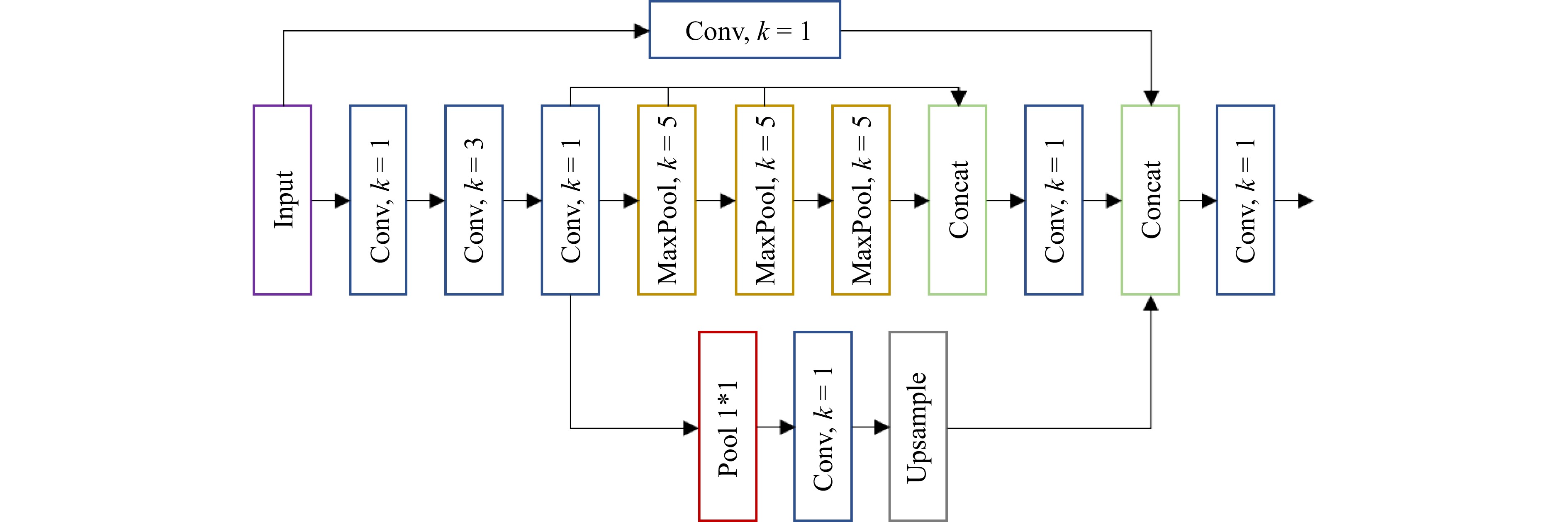
![]()
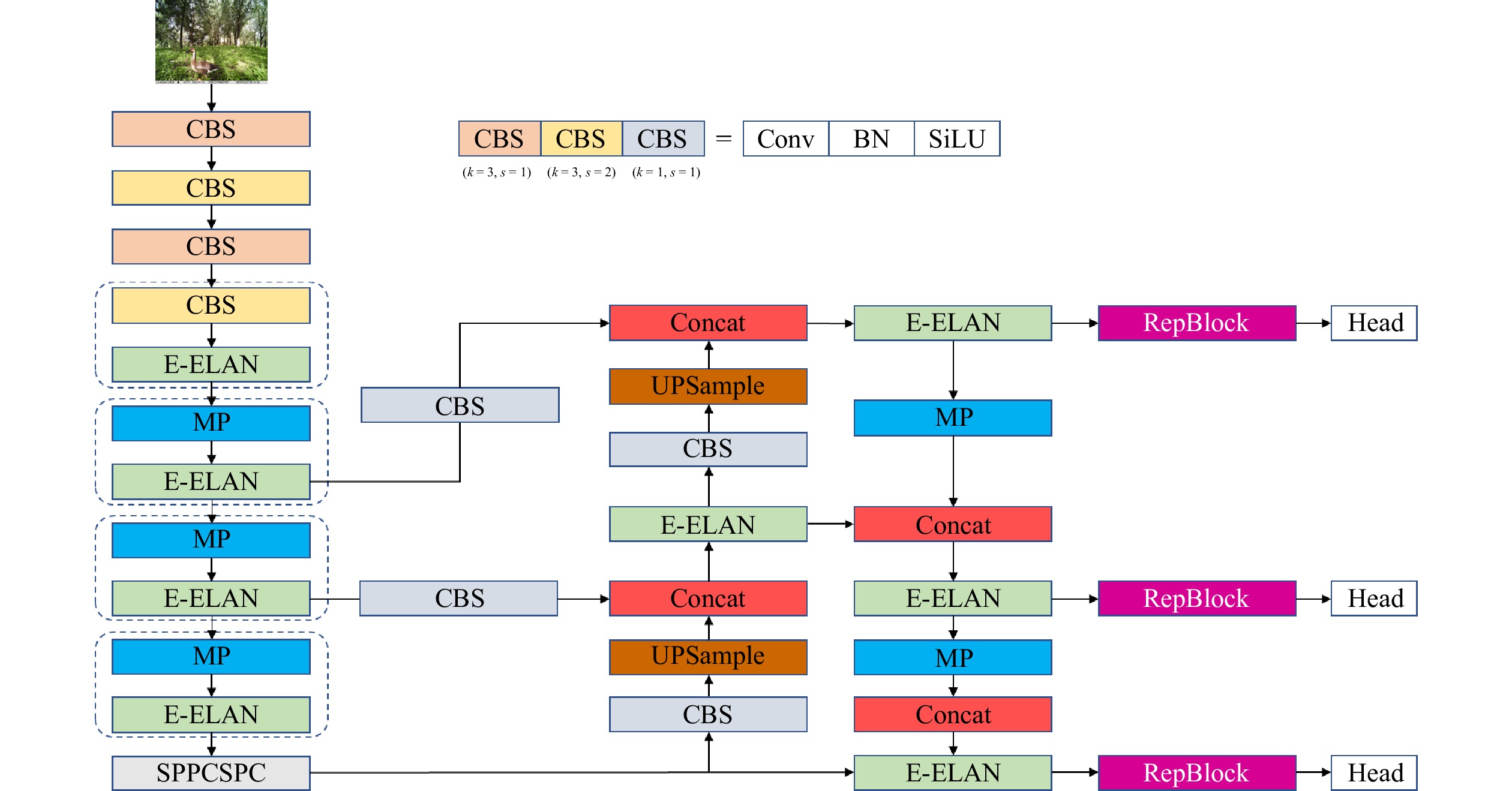
图 4 YOLOv7结构图
k. 卷积核大小 Kernel size; s. 步长 Stride. 下同。The same below.
Figure 4. YOLOv7 structure diagram
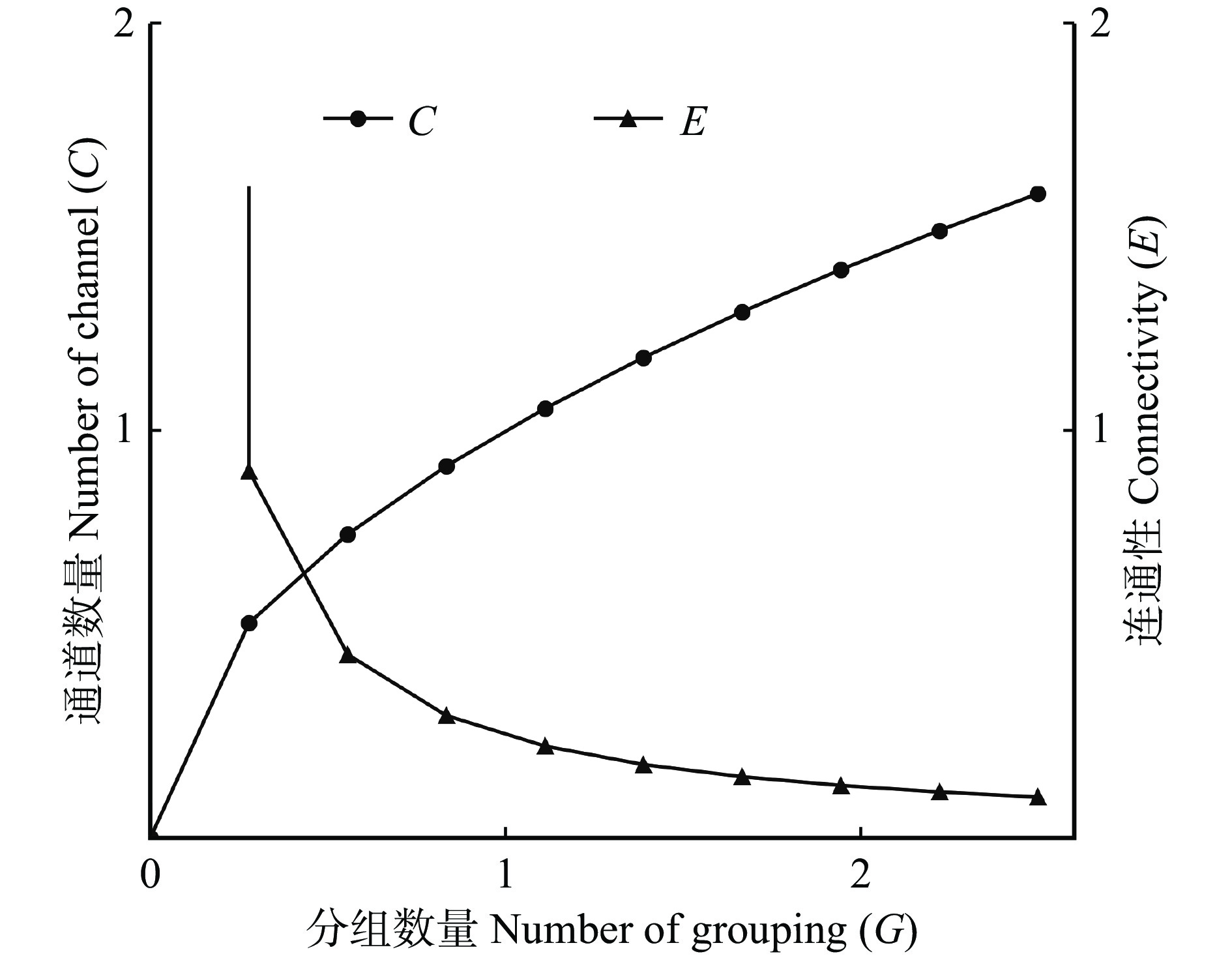
![]()
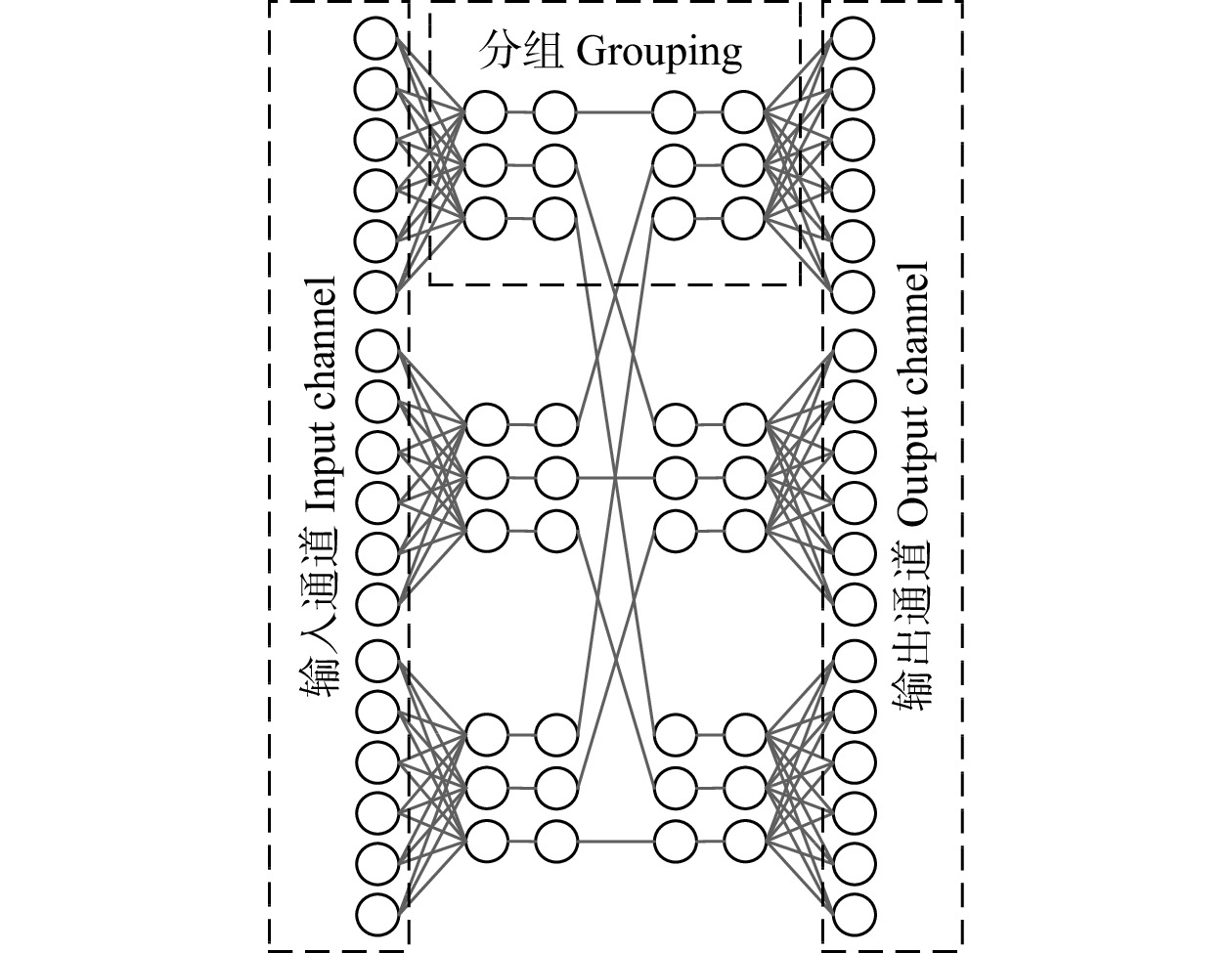
图 8 分组数量与通道数和连通性关系
Figure 8. Relationship between the number of groups, channel count and connectivity
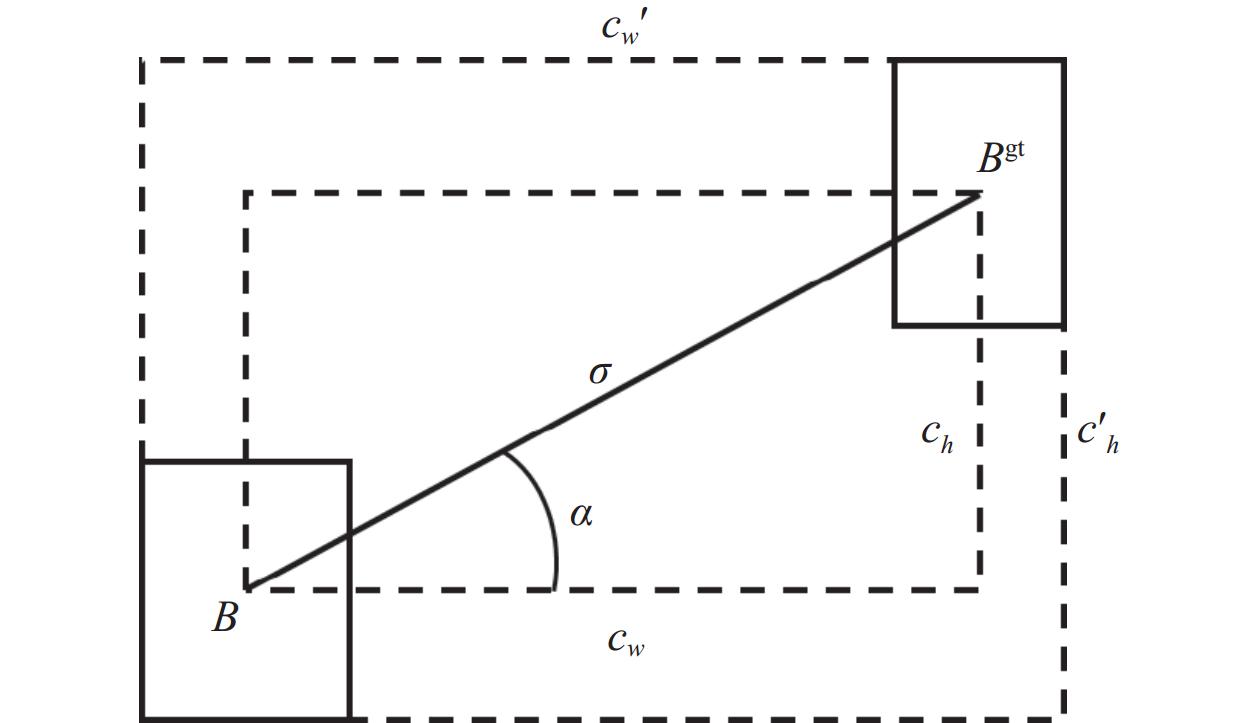
![]()
图 10 SIoU损失
B. 预测框中心点The center point of the predicted box;Bgt. 真实框中心点The center point of the ground truth bounding box;σ. 预测框与真实框中心点连接线The connection line between the predicted box and the center point of the ground truth bounding box;α. 预测框与真实框中心点连接线与x轴夹角The angle between the predicted box and the center point of the ground truth bounding box and the x-axis;cw,ch. 预测框与真实框中心点的宽度和高度差The width and height difference between the center point of the predicted box and the center point of the ground truth bounding box;c′w,c′h. 预测框与真实框的外接矩形的宽和高The width and height of the external rectangle of the predicted box and the ground truth bounding box
Figure 10. SIoU loss
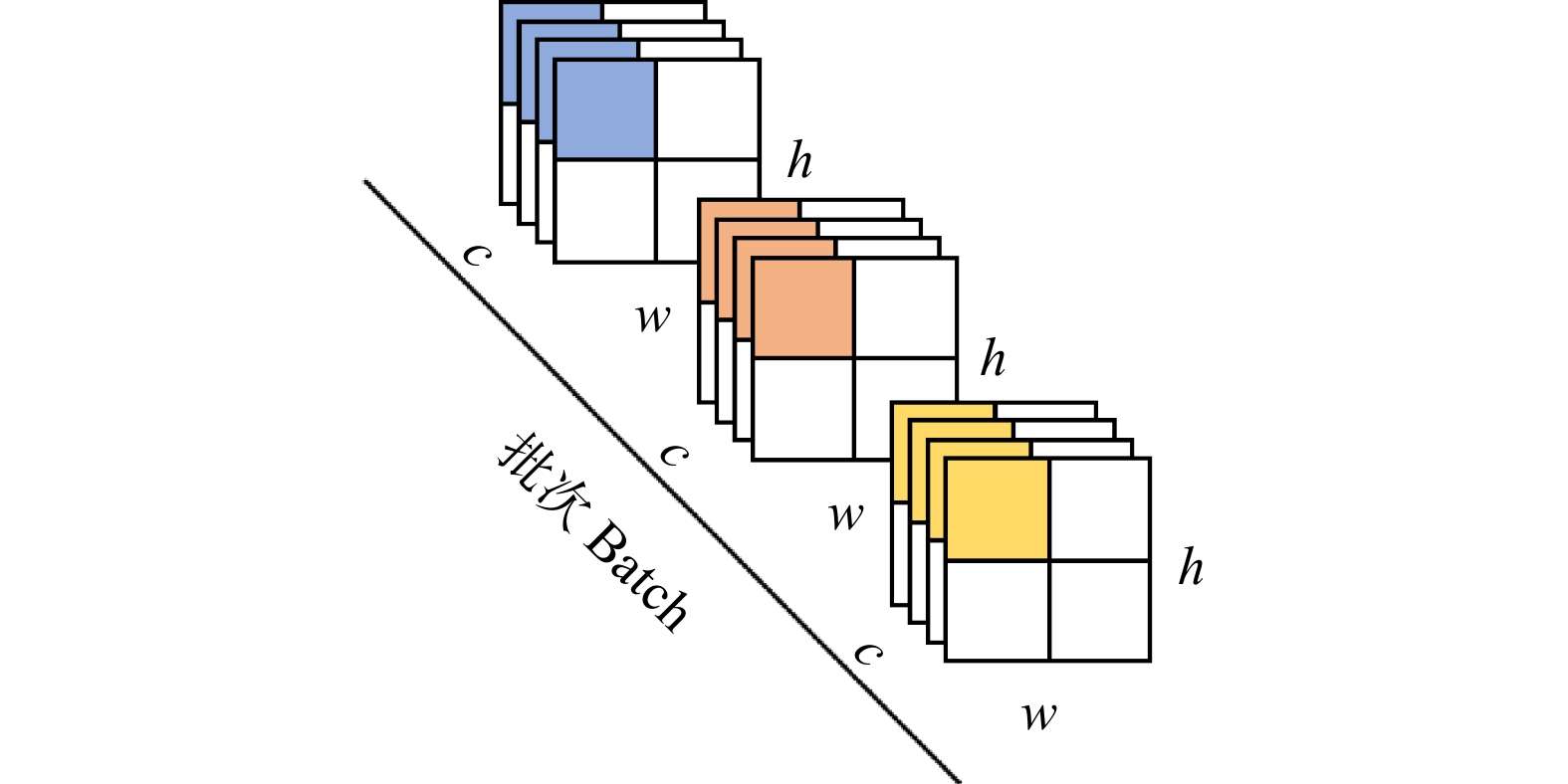
![]()
图 11 LNDown结构
b. 批次 Batch;c. 通道数量 Number of channels;w. 特征图宽度 Feature map width;h. 特征图高度 Feature map height. 下同。The same below.
Figure 11. LNDown structure
![]()
图 16 冻结不同层数平均精度曲线
Figure 16. Freeze average precision curves of different freezing layers
表 1 模型增强研究结果
Table 1 Results of models enhancement study
模型
Model参数量
Parameter quantity每秒浮点运算次数
Floating-point operation
per second (FLOPS)权重
Weight/%平均精度
Average
precision/%漏检误差
Omission
error/%错分误差
Commission
error/%推理速度
Inference speed/msYOLOv7 36.5 × 106 104.7 × 109 72.0 80.0 28.2 15.5 17.5 YOLOv7 + MicroBlock 31.3 × 106 72.7 × 109 61.5 78.9 30.1 13.0 15.6 YOLOv7 + Slim-SPPFCSPC 33.9 × 106 101.2 × 109 66.5 79.7 29.7 13.5 16.4 YOLOv7 + SIoU 36.5 × 106 104.7 × 109 72.0 81.0 27.0 15.3 17.6 YOLOv7 + LNDown 37.2 × 106 100.6 × 109 72.8 81.1 28.9 11.5 17.8 YOLOv7 + BiFPN 36.8 × 106 104.5 × 109 72.0 80.4 29.8 11.4 17.9 本模型 Our model 30.0 × 106 69.6 × 109 59.0 80.5 28.5 12.7 15.0 注:推理速度是指模型推理一张图像所需的时间。Note: Inference speed is the time it takes the model to infer an image.  下载: 导出CSV
下载: 导出CSV
表 2 不同模型在SS数据集子集上检测结果
Table 2 Detection results of different models on the SS subset
模型
Model参数量
Parameter quantityFLOPS 权重
Weight/%平均精度
Average precision/%漏检误差
Omission error/%错分误差
Commission error/%推理速度
Inference speed/msYOLOv5-m 21.2 × 106 49.0 × 109 41.0 80.2 28.8 16.0 14.5 YOLOv5-l 46.5 × 106 109.1 × 109 89.0 81.0 28.1 12.6 18.1 Ghost-YOLOv5-l 20.4 × 106 43.1 × 109 41.7 80.7 28.9 11.9 21.4 YOLOv6 34.9 × 106 85.8 × 109 72.5 79.8 27.7 16.3 17.2 YOLOX-M 25.3 × 106 73.8 × 109 194.0 80.6 28.9 12.2 19.2 YOLOR-CSP 52.9 × 106 110.1 × 109 203.0 80.4 30.6 11.6 18.4 本模型 Our model 30.0 × 106 69.6 × 109 59.0 80.5 27.9 12.7 15.0
下载: 导出CSV
表 3 迁移学习不同冻结方案结果
Table 3 Results of different freezing layers for transfer learning
% 冻结层数
Frozen layer平均精度
Average
precision漏检误差
Omission
error错分误差
Commission
error未迁移 Not transferred 69.5 37.5 21.9 0 82.1 24.8 11.4 3 81.9 28.0 10.2 5 76.7 33.3 13.4 11(冻结主干)
11 (freeze backbone)64.3 46.2 19.2
下载: 导出CSV
表 4 本文算法在自建数据集筛选结果
Table 4 Our algorithm filter results in the self-built dataset
真正例数量
Number of true positive假正例数量
Number of false positive真负例数量
Number of true negative假负例数量
Number of false negative漏检误差
Omission error/%错分误差
Commission error/%191 5 195 9 4.5 2.6
下载: 导出CSV
-
[1] Kays R, McShea W J, Wikelski M. Born-digital biodiversity data: millions and billions[J]. Diversity and Distributions, 2020, 26(5): 644−648. doi: 10.1111/ddi.12993
[2] 肖治术, 肖文宏, 王天明, 等. 中国野生动物红外相机监测与研究: 现状及未来[J]. 生物多样性, 2022, 30: 234−259. Xiao Z S, Xiao W H, Wang T M, et al. Infrared camera monitoring and research on wildlife in China: current status and future[J]. Biodiversity, 2022, 30: 234−259.
[3] Villa A G, Salazar A, Vargas F. Towards automatic wild animal monitoring: identification of animal species in camera-trap images using very deep convolutional neural networks[J]. Ecological Informatics, 2017, 41: 24−32. doi: 10.1016/j.ecoinf.2017.07.004
[4] Norouzzadeh M S, Nguyen A, Kosmala M, et al. Automatically identifying, counting, and describing wild animals in camera-trap images with deep learning[J]. Proceedings of the National Academy of Sciences, 2018, 115(25): e5716−e5725.
[5] Schneider S, Greenberg S, Taylor G W, et al. Three critical factors affecting automated image species recognition performance for camera traps[J]. Ecology and Evolution, 2020, 10(7): 3503−3517.
[6] Guo Y, Rothfus T A, Ashour A S, et al. Varied channels region proposal and classification network for wildlife image classification under complex environment[J]. IET Image Processing, 2020, 14(4): 585−591. doi: 10.1049/iet-ipr.2019.1042
[7] Chen P, Swarup P, Matkowski W M, et al. A study on giant panda recognition based on images of a large proportion of captive pandas[J]. Ecology and Evolution, 2020, 10(7): 3561−3573. doi: 10.1002/ece3.6152
[8] Tan M, Chao W, Cheng J K, et al. Animal detection and classification from camera trap images using different mainstream object detection architectures[J]. Animals, 2022, 12(15): 1976. doi: 10.3390/ani12151976
[9] Cai Z, Vasconcelos N. Cascade r-cnn: delving into high quality object detection[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake: IEEE, 2018: 6154−6162.
[10] Tian Z, Shen C, Chen H, et al. Fcos: fully convolutional one-stage object detection[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 9627−9636.
[11] Vecvanags A, Aktas K, Pavlovs I, et al. Ungulate detection and species classification from camera trap images using RetinaNet and faster R-CNN[J]. Entropy, 2022, 24(3): 353. doi: 10.3390/e24030353
[12] Roy A M, Bhaduri J, Kumar T, et al. WilDect-YOLO: an efficient and robust computer vision-based accurate object localization model for automated endangered wildlife detection[J]. Ecological Informatics, 2023, 75: 101919. doi: 10.1016/j.ecoinf.2022.101919
[13] Huang G, Liu Z, van der Maaten L, et al. Densely connected convolutional networks[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Hawaii: IEEE, 2017: 4700−4708.
[14] Li Y, Chen Y, Dai X, et al. Micronet: improving image recognition with extremely low flops[C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. Montreal: IEEE, 2021: 468−477.
[15] Tan M, Pang R, Le Q V. Efficientdet: scalable and efficient object detection[C]// Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. Seattle: IEEE, 2020: 10781−10790.
[16] He K, Zhang X, Ren S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904−1916. doi: 10.1109/TPAMI.2015.2389824
[17] Liu Z, Mao H, Wu C Y, et al. A convnet for the 2020s[C]// Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. New Orleans: IEEE, 2022: 11976−11986.
[18] Ge Z, Liu S, Wang F, et al, Yolox: exceeding yolo series in 2021[J/OL]. arXiv preprint arXiv: 2107.08430, 2021 [2023−12−23]. https://arxiv.linfen3.top/pdf/2107.08430.pdf.
[19] Wang C Y, Yeh I H, Liao H Y M. You only learn one representation: unified network for multiple tasks[J/OL]. arXiv preprint arXiv: 2105.04206. 2021 [2023−12−23]. https://arxiv.linfen3.top/abs/2105.04206.pdf.
-
期刊类型引用(3)
1. 赵尧,付伟莲,关惠元. T型圆竹家具构件力学性能研究. 林产工业. 2024(10): 42-46 .  百度学术
百度学术
2. 刘燕,唐斌,万川,何叶,胡文刚. 实木家具斜角接合结构的可拆装设计与评估. 林产工业. 2023(04): 38-42+50 . 百度学术
3. 陈炳睿,胡文刚. 一种可拆装式椭圆榫节点的设计与性能分析. 木材科学与技术. 2022(02): 65-70+86 . 百度学术
其他类型引用(0)

















计量
- 文章访问数: 455
- HTML全文浏览量: 214
- PDF下载量: 84
- 被引次数: 3
